改进双向A\*算法在室内机器人导航全局路径规划中的应用

打开文本图片集
关键词:机器人导航;改进双向 A* 算法;路径搜索;特殊地形;逼近法;冗余节点中图号分类:TN919-34;TP242 文献标识码:A 文章编号:1004-373X(2026)09-0172-06
Improved bidirectional A* algorithm for global path planning in indoor robot navigation
PengZhen,LuoXiaolong,MinChenyu,XiangLongwei (SchoolofGeosciences,YangtzeUniversity,Wuhan43o1oo,China)
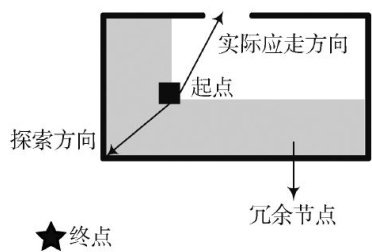
Abstract:Inviewoftheexcessveredundant nodesandloweficiencyinthetraditionalpathplanningalgorithmsfor complex indoor environments(multi-enclosedand single-exit terrain),this paper proposesan improvedbidirectional A* algorithm. Thedynamicstartingpointsaregeneratedbymidpointoffsetandjumppointcalculation,soastoalignactualdirectionwith target direction of the starting points.The XY -approximation strategyis implemented to reduce invalid nodes in the exploration. Theheuristicfunctionisimproved,theobstaclesaretakenintoaccount,anincrementisadedtotheestimatedcost,andthe ratioofthenode-to-targetdistanetothestart-enddistaneistakenastheattenuationfactoroftheincrement.Simulation comparisons with A* ,weighted A* ,bidirectional A*,and jump point search demonstrate that the improved method shows superiorityinexplorednodes,computation time,andmemoryconsumptionandmaintainsnear-optimal paths.This method isapplicableinroboticnavigation,smartwarehousing,andotherelectronictechnologyfields,offeringeficientsolutionsfor low-computational-power devices.
Keywords:roboticnavigation;improved bidirectionalA*algorithm;pathsearch;special terrain;approximationmethod; redundant node
0 引言
寻路算法在机器人导航、自动驾驶、智能仓储等领域有很大的研究价值[1-4]。(剩余9070字)