基于隐马尔科夫模型和LSTM的蜂窝网联无人机轨迹识别技术研究

打开文本图片集
关键词:蜂窝网联无人机;轨迹识别;道路匹配;LSTM;隐马尔科夫;动态时间规整中图分类号:TN919-34;V279;TP183 文献标识码:A 文章编号:1004-373X(2026)07-0019-07
Cellular networked UAV trajectory recognition technique based on Hidden Markov modelandLSTM
HE Xiang,LEI Chaojun,LI Zeng,JIA Chunlei (Schoolof Police Equipment Technical, China People's Police University,Langfang O650oo,China)
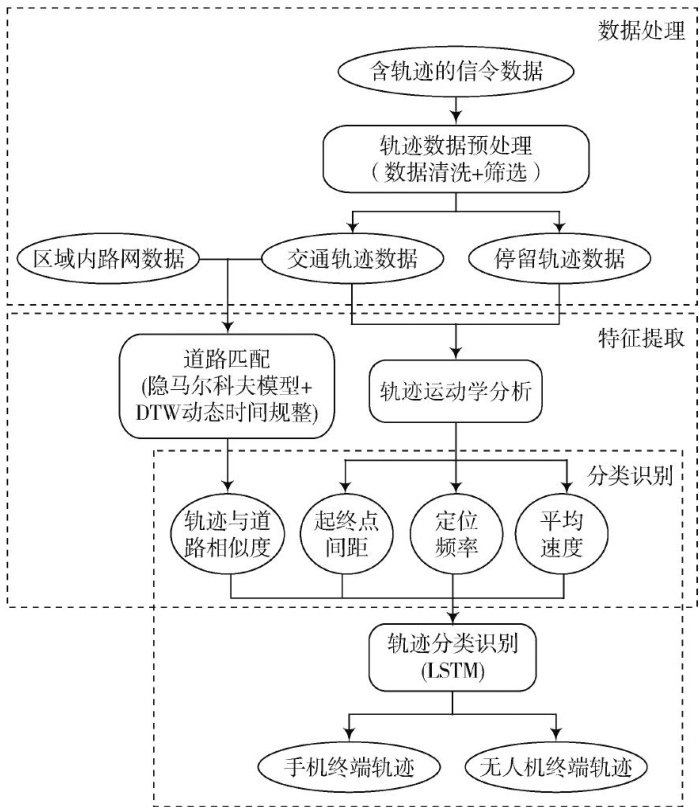
Abstract:Inviewofthecomplexityandparticularityof theelectromagneticenvironmentinkeyareas,aswell asthe powerfulconcealmentofthecelularnetworkedUAV(unmannedaircraftvehicle)anditscharacteristicsthataredificulttobe detected bythetraditionaldetection means,anewUAVtrajectoryrecognitionmethodbasedonthehidden Markov model(HMM) andthelongshort-term memory(LSTM)neural network isproposed.Alargenumberofsignalingdata willbe generated when celularuserscommunicatewithnearbycellularbasestationsduringoperation.Positioninformationisextractedfromthese signalingdatafortrajectorykinematicsanalysis,soastoobtaincharacteristicparameters,includingspeed,andthedistancefrom startandtoend.Thecharacteristicparametersandroadnetworkdata withintheveryareaaresubjectedtoroadmatchingbasedon HMM.Thedynamictime warping(DTW)algorithmisusedtocalculatethesimilaritycharacteristicsof thetrajectoryandtheroad. Aftercomparison,thesecharacteristicsaretrainedastheinputdataofLSTM,soastoidentifysuspectedUAVusesfromthemany celularnetworkedusersinkeysecurityareas.Theexperimentalresultsshowthat,whenthepositioningeroris2Om,the clasificationrecognitionaccracyofUAVterminaltrajectoriesandothertraffcterminaltraectoriesareover9O%byselectingthe outputresultsoftwo-classficationandsix-classfcationwithorwithoutsilritycharacteristics.Thepropoedalgoriprovides a new idea for the development of UAV detection field.
0 引言
无人机(UnmannedAircraftVehicle,UAV)技术的快速发展和广泛应用给人们的生活带来了诸多便利。(剩余8666字)