基于自适应分割网络的隧道车道线检测

打开文本图片集
中图分类号:U467.4文献标识码:A
DOI:10.3969/j.issn.1674-8484.2025.03.014
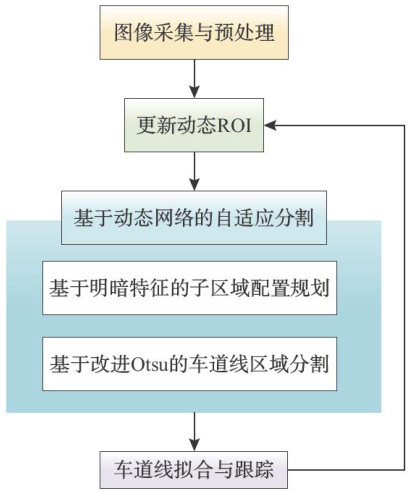
Abstract:Aiming toaddress the issuesof reliance on prior knowledgeandlimitedadaptability in traditional image segmentation approaches within tunnel scenarios,a lane line detection method was proposed based on anadaptive segmentation network.Firstly,asub-region planning methodbasedonilluminationcharacteristics wasdesigned,whichadaptivelydeterminedthenecessityofmulti-regionsegmentation byextractingillumination feature signalsand providedthe coresponding sub-region configuration scheme in real time.Secondly,a lane linearea segmentationmethod was proposed basedon improved Otsu.Eachsub-regioncan independently adjustthesegmentation threshold according to the lightingcharacteristics toachieve precise segmentation of the lane line area.Finally,a dynamic region of interest update method was designed to update the region of interest (ROl) of the current frame based onthedetectionresultsof the previous frame.Theresultsshow that the detection accuracy of the proposed algorithm reaches 96.73% ,and the average processing time per frame is24.77msintypical tunnel scenariossuchascomplexlighting,lowillumination,anddiscontinuous lane lines,indicating thattheproposedmethodhastheadvantagesindetectionaccuracydetectioneficiencyand robustness,and can meet the needs of real-time performance.
Key words:automobile test; lane detection; image segmentation;adaptive segmentation; Otsualgorithm; dynamic region of Interest (ROl)
随着人工智能技术与汽车工业的迅速发展,车辆的智能化成为发展的主要方向。(剩余11482字)
