基于深度生成网络的夜间车道线检测方法

打开文本图片集
中图分类号:TP391 文献标识码:A DOI:10.3969/j.issn.1674-8484.2025.03.011
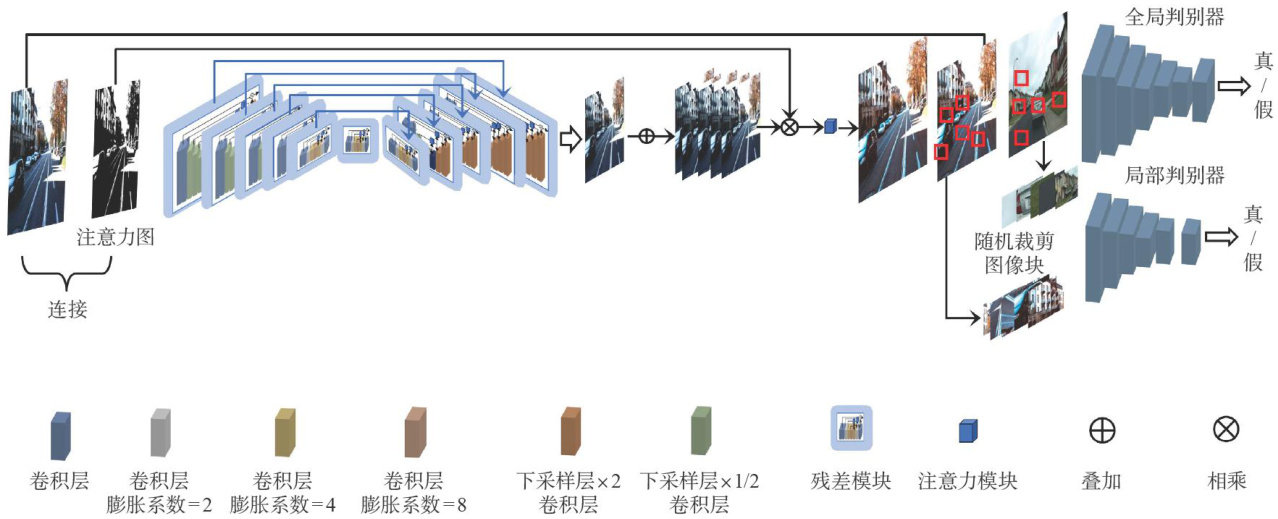
Abstract:Inorder toensure the safe driving of vehicles at night,the night lane lines were accurately recognized and lane departure warnings were made,a deep generative network EnhanceGAN for nightime imageenhancement andanend-to-end lane line detection network AtentiveLSTR based on Transformer were proposed for nightime lane linedetection,and experimentswith real vehicles wereconducted.The deep generative network EnhanceGANused the improved UNetas the generatorof thenetwork,adopteda two-layer nested U-shape structure toexpandthesensory field,andaddeda Markov local discriminatorandacombined lossfunction toenhance the detailed informationoflaneline edgesand textures.The laneline detection network AttentiveLSTR used ResNeXtasa featureextraction network toensure the network depthand reduced the numberof modelparameters,and introduced feature pyramid networks(FPN)toextract lanelineedgeand shape information.Theresults show that compared with themainstream methods CycleGANand Gamma Correction, the pro[osed method is more effective in nightime image enhancement on the BDD100k dataset,witha high contrastbetweenlane linesandsurounding environment,structural similarity(SSlM)of 0.8834,naturaland realistic imagesasawhole,peaksignal-to-noiseratio(PSNR)of40.2654,and natural imagequalityevaluation index (NiQE) of 3.4233;the detectionaccuracy (Acc) on the CULane dataset is 90.12% ,and the processing speed is fast,with82 frames persecond (FPS).Theresearch resultscanprovidea reference for nightime lane line deviation scenarios.
Key words: inteligent driving;automotive safety; generation network; nightscenes; lane detection; deep learning
随着智能交通的迅速发展,人们对汽车安全相关辅助驾驶技术的需求与日俱增[。(剩余13642字)
