基于深度强化学习的智能网联车辆盲区通行策略

打开文本图片集
中图分类号:TP273 文献标识码:A DOI:10.3969/j.issn.1674-8484.2025.03.013
Abstract:Ablind spot pasing strategy method was proposed by using the deep reinforcement learning for intelligent connected vehicles (ICV)to prevent traficaccidents between vehiclesand pedestrians when passing through visual blindspots.Amathematical description model wasestablished for typical blind spot scenarios considering three indicators of safety,eficiencyand comfort; whileadeepreinforcement learning model was designedbasedonthe DoubleDQN(doubledeep Q-network)with theTTC (time tocolision)indicator to establishasetof physically interpretable reward functions,withtheoutputbeing the vehicle'sacceleratorand the brake pedal depth.Simulation experiments were conducted under three scenarios to assess thealgorithm eficacy.Theresultsshow thatthesimulationexperimentsverifytheeffctivenessof thealgorithm.Thecomfort is increased by more than 50% onaverage of this method,compared with the traditional DQN method.The method improvesdecision-makingaccuracy.Therefore,the longitudinaldecision-makingmethodachievesthe safety,theefficientand the comfortable.
Key words: inteligent connected vehicle (ICV);deep reinforcement learning; pedestriancollisionavoidance; time to collision (TTC)
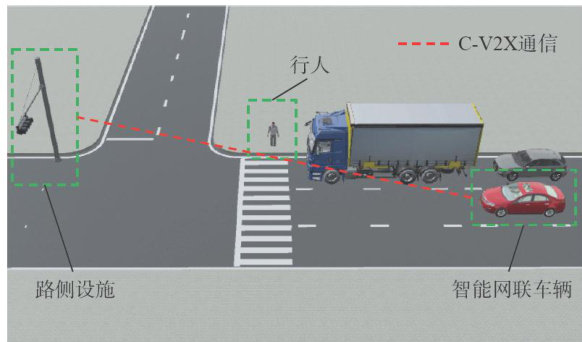
智能网联汽车(intelligentconnectedvehicle,ICV)能够增强行车安全,提高通行效率;因此,结合智能网联技术的自动决策和规划方法在近年来成为了研究热点[1-2]。(剩余10636字)
