注册帐号丨忘记密码?
1.点击网站首页右上角的“充值”按钮可以为您的帐号充值
2.可选择不同档位的充值金额,充值后按篇按本计费
3.充值成功后即可购买网站上的任意文章或杂志的电子版
4.购买后文章、杂志可在个人中心的订阅/零买找到
5.登陆后可阅读免费专区的精彩内容
打开文本图片集
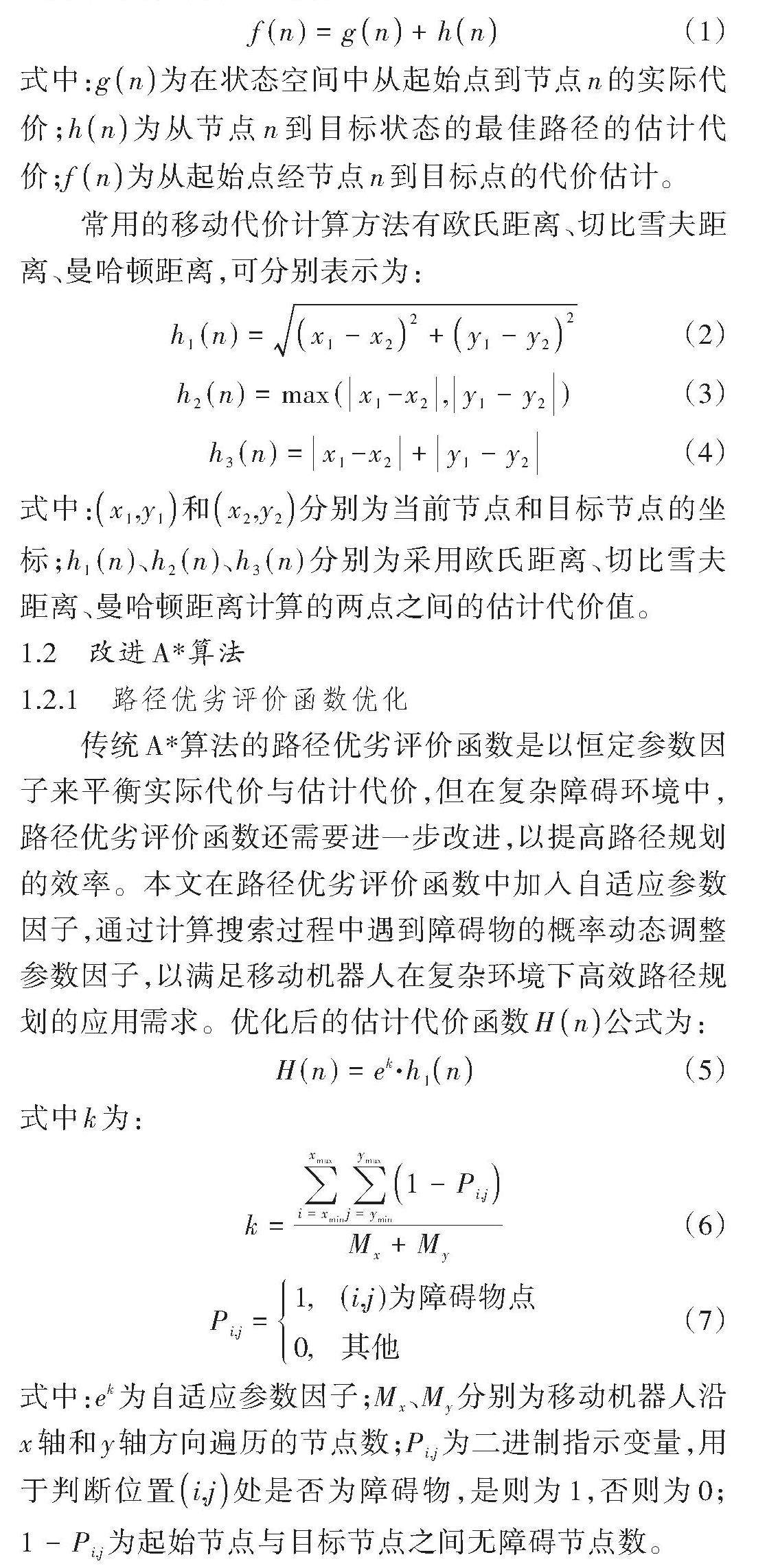
摘 要: 针对复杂环境中移动机器人路径规划效率低、环境适应能力差等问题,提出一种融合改进A*算法和动态窗口法(DWA)的路径规划算法。首先,在全局规划中采用自适应参数因子和安全半径路径优劣评价函数对冗余节点进行优化,提取关键节点,再使用圆弧处理法对已规划路径进行平滑度优化;然后,采用改进安全距离评价子函数的动态窗口法进行局部规划,提升了移动机器人的避障性能;最后,对融合算法进行仿真和实物实验。(剩余14795字)
登录龙源期刊网
购买文章
改进A*和DWA的机器人路径规划研究
文章价格:6.00元
当前余额:100.00
阅读
您目前是文章会员,阅读数共:0篇
剩余阅读数:0篇
阅读有效期:0001-1-1 0:00:00