基于强化学习的工业机械臂数字孪生与智能控制

打开文本图片集
摘 要:为实现对工业机械臂的实时高效,自动化智能控制,提出一种基于数字孪生技术的工业机械臂控制方法。该方法基于改进的数字孪生系统框架,建立工业机械臂的数字孪生体;链接物理实体和虚拟空间,实现数据的上下行交互;使用深度强化学习算法训练数字孪生体,实现对工业机械臂的智能控制。
关键词:数字孪生;工业机器人;强化学习;智能控制;PPO算法
图分类号:TP273+.2 文献标志码:A 文章编号:2095-2945(2023)23-0027-04
Abstract: In order to realize the real-time, efficient and automatic intelligent control of industrial manipulator, a control method of industrial manipulator based on digital twin technology is proposed. Based on the improved digital twin system framework, the method establishes the digital twin of the industrial manipulator, links the physical entity and the virtual space to realize the upstream and downlink interaction of the data, and uses the deep reinforcement learning algorithm to train the digital twin to realize the intelligent control of the industrial manipulator.
Keywords: digital twins; industrial robot; reinforcement learning; intelligent control; PPO algorithm
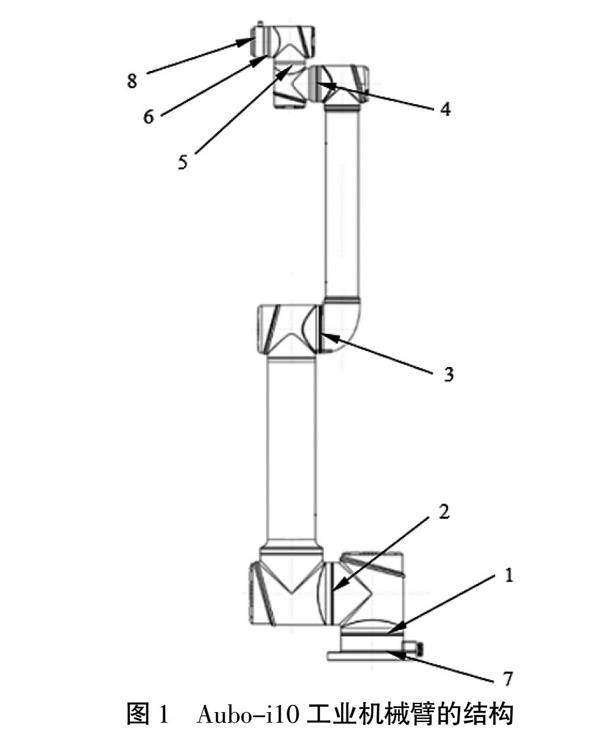
如今,在中国制造2025背景下,智能制造工程备受关注,数字孪生技术也正在成为受到关注和重视的工业热点话题,聚焦到工业机械臂问题上,在现实工业机械臂的应用中,示教法是大多数企业对于机械臂采用的控制方法。(剩余5556字)
