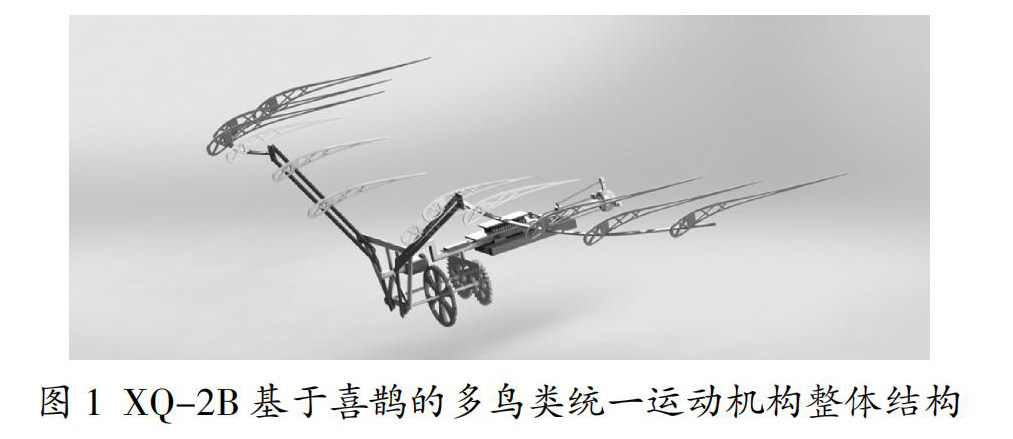
基于喜鹊的多鸟类统一运动机构设计与实验

打开文本图片集
摘 要:首先概述目前仿生鸟类扑翼飞行器发展缓慢的原因,针对其原因设计一种具有普适性的多鸟类统一运动机构,并对其主要结构进行简单的概述;其次通过inspire对运动部分进行运动分析实验,采集各项实验数据,并可视化处理;然后通过JJ124BC分析天平对模型运动机构整体质量进行抗压实验和质量数据采集,验证材料制造方面可行性;最终形成由提取蓝本参数、代入运算进行设计、虚拟样机仿真和扑翼飞行器制造的完整结构,践行设计制造一体化和微型扑翼飞行器实验研究的严谨性和实践性。(剩余4248字)
