注册帐号丨忘记密码?
1.点击网站首页右上角的“充值”按钮可以为您的帐号充值
2.可选择不同档位的充值金额,充值后按篇按本计费
3.充值成功后即可购买网站上的任意文章或杂志的电子版
4.购买后文章、杂志可在个人中心的订阅/零买找到
5.登陆后可阅读免费专区的精彩内容
打开文本图片集
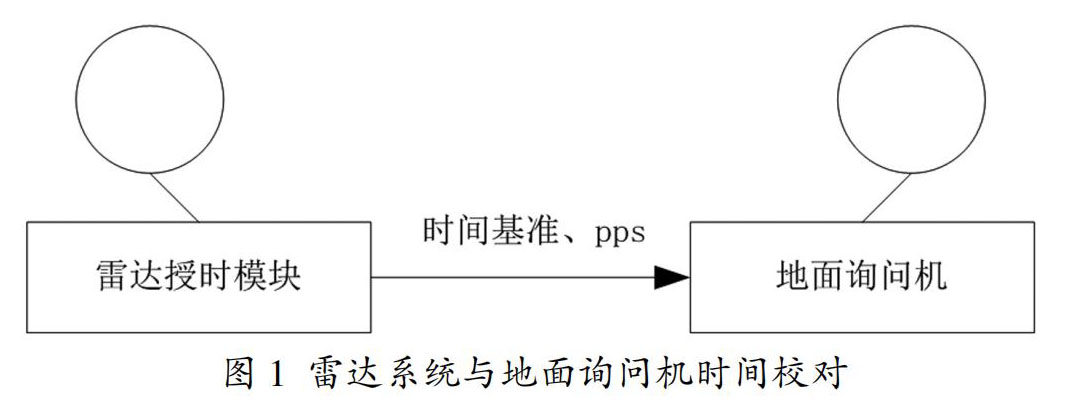
摘 要:广播式自动相关监视系统由于存在检测环境、目标数量和运动模式动态变换的问题,导致空域多目标跟踪过程具有大量未知干扰与不确定性,降低了组网系统的数据处理精度。提出联合多雷达和ADS-B系统并采用自适应交互式多模型滤波算法进行多传感器跟踪和数据融合。该方法能够降低雷达航迹数据的平均斜距与方位角分量的误差和时空不确定性,优化ADS-B系统的精度与稳定性。(剩余4581字)
登录龙源期刊网
购买文章
联合多雷达与ADS-B的监视数据融合与误差配准方法
文章价格:4.00元
当前余额:100.00
阅读
您目前是文章会员,阅读数共:0篇
剩余阅读数:0篇
阅读有效期:0001-1-1 0:00:00