自动焊接装置凸轮连杆机构的多目标优化设计

打开文本图片集
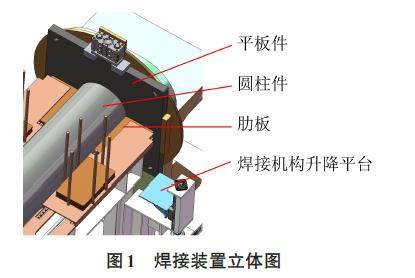
摘要:【目的】为提高钢柱与肋板的自动化焊接生产效率,设计了专用焊枪移动机构。【方法】首先,为满足焊枪的移动轨迹和速度,设计了凸轮连杆组合机构,并建立了机构的运动学模型;其次,基于NSGA-Ⅱ算法,以机构的传动性能和整体尺寸为优化目标,在限定条件下对连杆长度进行了多目标优化设计,使用熵权法从Pareto非劣解集中选取了最优连杆长度;再次,在最优杆长的二维平面中搜索最优滚子坐标,并使用Matlab编程获得凸轮廓线,验证了凸轮机构压力角满足设计要求;最后,基于优化结果,结合实际工况,对机构建模并使用Adams软件仿真获得机构工作轨迹、速度和加速度。(剩余12341字)
