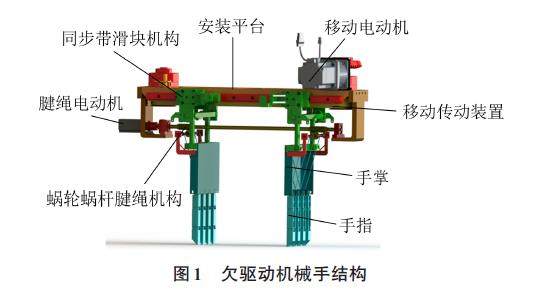
混合工作模式的双路径传动欠驱动机械手设计与接触力学分析

打开文本图片集
摘要:【目的】针对矸石、木块等煤炭异物形状轮廓不规则、粒度变化范围大、体积较薄的特点,导致煤炭异物难以抓取的问题,提出了一种混合工作模式的欠驱动机械手。【方法】该机械手应用包络抓取与平行抓取分别抓取轮廓不规则物体与薄类物体;通过平行移动改变手指的抓取空间,以适应不同粒度范围内煤炭异物抓取;根据手指的运动过程,提出了不同粒度范围内煤炭异物的抓取方法;建立手指的接触力模型,得到手指抓取时的接触力变化,为该机械手抓取的稳定性研究提供依据。(剩余10900字)
