多线程半全局立体匹配工件内部检测方法

打开文本图片集
关键词:双目视觉;立体匹配;三维重建;工件测量
中图分类号:TP391.41
DOI:10.3969/j.issn.1004-132X.2025.11.037
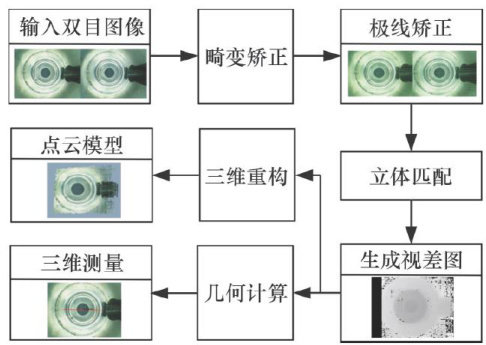
Abstract:To address the problems that traditional detection methods were difficult to conduct threedimensional quantitative analysis inside workpieces,a binocular vision detection method was proposed based on multi-threaded semi-global stereo matching(M-SGSM). Firstly,the Zhang's calibration method was used to obtain the parameters of the binocular endoscope,and image distortion correction and epipolar rectification were performed. Secondly,a multi-threaded regional overlap segmentation strategy was designed to optimize the stereo matching algorithm,improve the eficiency of disparity map calculation,and generate a 3D color point cloud. Finally,a self-calibration area measurement method combined with Euclidean distance calculation was proposed to realize three-dimensional quantitative analysis.Experimental results show that the optimized stereo matching algorithm improves computational eficiency by approximately 30% ,the generated 3D point cloud has a clear structure,the Euclidean distance measurement error is less than 3% ,and the area measurement error is less than 1.5% . This method provides an efficient and high-precision solution for three-dimensional internal detection of workpieces.
Key words: binocular vision; stereo matching;3D reconstruction;workpiece measurement
0引言
在现代工业制造和工程领域中,精准的工件内部检测是保证产品质量和性能的关键。(剩余12584字)
