基于6D光笔的工业机器人高精度示教方法

打开文本图片集
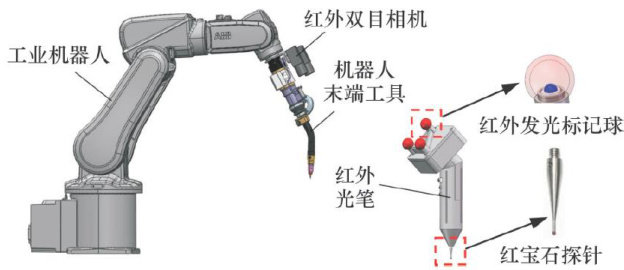
关键词:机器人示教;6D光笔;红外双目相机;手眼标定
中图分类号:TP242
DOI:10.3969/j.issn.1004-132X.2025.11.029
Abstract:Aiming at the problems of poor precision,sensitivity to light and restricted teaching range in current industrial robot vision teaching methods,a high-precision industrial robot teaching method was proposed based on a 6D light pen. The light pen was equipped with three infrared-emiting marker balls, and infrared binocular camera mounted on the robot's end-effector captured the marker balls to obtain their 3D position coordinates and 3D pose information. Two measures were implemented to enhance the vision teaching precision of the 6D light pens.Firstly,a hand-eye calibration method was proposed based on infrared light-emitting marker bals,which significantly improved the transformation precision from the camera coordinate system to the robot tool coordinate system. Secondly,an adaptive camera tracking method was proposed,allowing the robot to automatically track the position of the light pen through the camera mounted on the end-effector,ensuring that the marker bals remain centered in the camera’s field of view, thus effectively improving the teaching precision. Finally,the captured teaching trajectory was transformed into the robot base coordinate system to achieve trajectory programming and tracking. Experimental results show that the maximum single-point error of the light pens is as 0.63mm , the maximum pose error is as (204号 2.1432∘ ,and the maximum trajectory error is as 0.73mm . The proposed teaching method may achieve high-precision and high-eficiency teaching for robots.
Key words:robot teaching;6D light pen;infrared binocular camera;hand-eye calibration
0 引言
工业机器人是人工智能和自动化制造领域的核心装备,它可以帮助人们完成高精度重复性作业任务,同时也可以在极端环境下进行工作,因此广泛应用于焊接、码垛、运等环境中[1]。(剩余13883字)
