面向机器人柑橘采摘的控制系统设计与试验

打开文本图片集
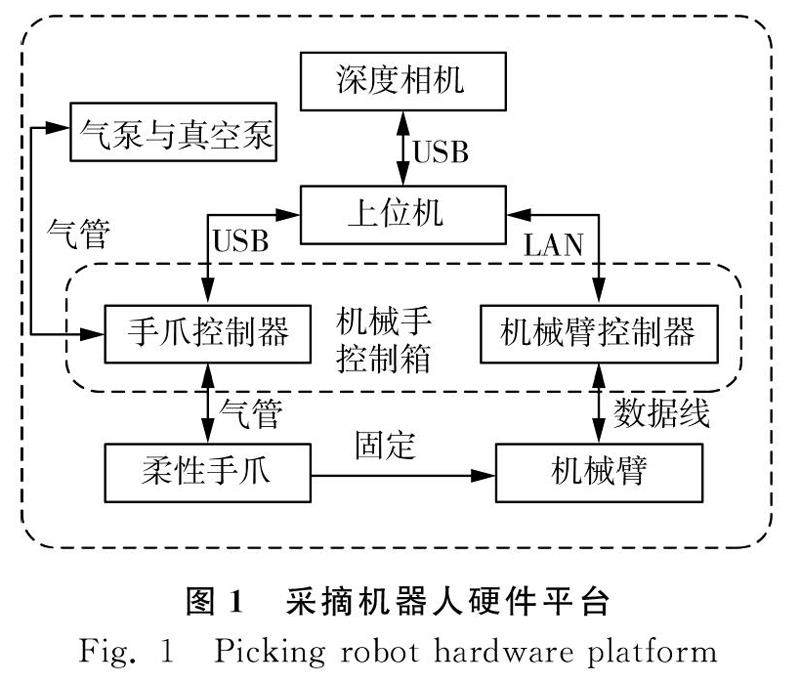
摘要:面向柑橘采摘,构建以上位机、RealSenseCameraR200深度相机、VS-6556垂直多关节工业用机械臂、三指柔性手爪等组成的采摘机器人硬件平台。以Windows10为开发环境,采用librealsense相机软件开发工具包、OpenCV计算机视觉库、TensorFlow-GPU和Keras深度学习框架、ORIN2机械臂控制软件开发工具包、ArduinoIDE函数库以及SerialPort串口通信软件开发工具包等,研究基于深度相机、机械臂二次开发的采摘控制系统设计,包括视觉识别定位、手爪动作控制、机械臂运动控制以及采摘控制等模块的程序设计。(剩余13417字)
