六轴机器人自动化料仓改进设计与模态分析

打开文本图片集
中图分类号:TS64 文献标识码:A 文章编号:2095-2953(2025)12-0018-0
Improved Design and Modal Analysis of Six-axis Robot Automated Silo
XIAN Bao-gang,YANG Jing,ZHANG Zi-bin,LUO Qing,LIN Sheng-ben,XIAN Wei(Tianshui Normal University,Tianshui Gansu 7412OO,China)
Abstract:Inorder to study the problems of poor operational stability,low positioningaccuracyand severe structural wearofthe chain-type rotaryfeeding silo during operation,thecorecomponents of the automated silo were improved and designed.The ballscrewand sliderail system with higher precision was adopted to replace the traditional chaintype rotary feeding device.The theoretical design parameters of the ballscrew were obtained through selection calculations,the structure of the automatic centering device was improved,and the selection design of the cylinder and distance sensor was caried out.Finally,to avoid resonance,finite element simulation analysis and research were conducted on the natural frequencies and modal characteristics of each order of the core component-the supporting componentunder the free state and the joint-constrained state.The vibration characteristicsunder diffrent states were obtained,andthechangesofthefirst1ordersof natural frequenciesandmodeshapesweresummarizedandanalyzed. This provides a theoretical basis for the design of core components to avoid resonance.By improving this automated silo, the grasping accuracy of the manipulator and the production eficiency of the products have been enhanced.
Key Words:automated silo;selection and design;resonance;constraint state;natural frequency;modal characteristics
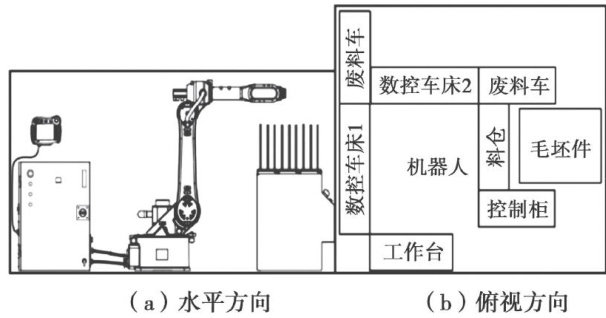
随着传统制造业正加速向自动化、柔性化和数字化方向转型,六轴机器人以其灵活的运动轨迹、多自由度操作能力,成为自动化生产线的关键执行单元,其局限性在于单独作业难以满足高精度加工需求[1]。(剩余7007字)
