基于实车调参的自动驾驶模糊PID纵向控制算法

打开文本图片集
中图分类号:TB9;U463.6 文献标志码:A 文章编号:1674-5124(2025)06-0179-10
Fuzzy PID longitudinal automatic control algorithm based on real vehicle parameter adjustment
ZENG Fangzheng', GAO Xiujing1², YUAN Zhiqun1², YOU Shuanghe³, ZHANG Bincent,HUANG Wenyin', HAN Yong1,2
(1.School of Mechanical and Automotive Engineering, Xiamen University of Technology, Xiamen , China; 2.Fujian Provincial Key Laboratory of Advanced Design and Manufacture for Bus Coach, Xiamen , China; 3. Technology Research Center of Xiamen Golden Dragon Bus Co.,Ltd., Xiamen , China)
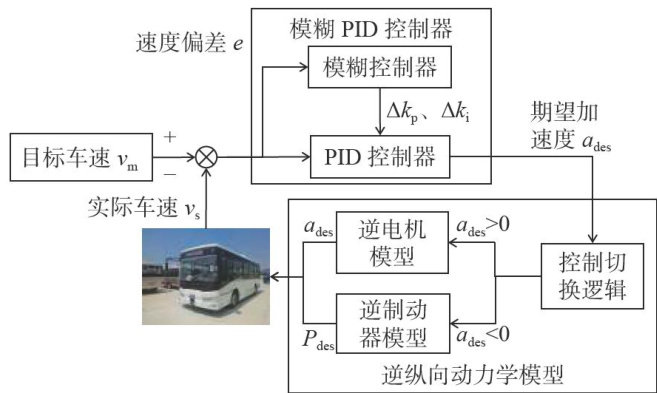
Abstract: Aiming at the dynamic instability problem of automatic driving longitudinal control algorithm in real vehicle application,a logic switching control strategy with expected acceleration as switching logic is designed based on a city bus as a test platform. The inverse dynamic model of the vehicle is calibrated by using the experimental method,and the expected throtle opening and expected brake pressure are obtained with the vehicle speed and expected acceleration as the input conditions.The fuzzyPID control algorithm based on PID control parameter adjustment range and seting experience is established through the step response test of the real vehicle. A fuzzy PID longitudinal control algorithm based on real vehicle parameter adjustment is proposed.The fast restoration test system based on AUTOBOX and Simulink framework is embedded into he vehicle for real vehicle closed-loop test.The results show that the maximum longitudinal speed error of the real vehicle is 0.66% and 0.88% respectively under the expected speed step change condition and the expected speed ramp change condition, which verifies the effectivenessand control accuracy of the algorithm. The fuzzy PID longitudinal control algorithm based on real vehicleparameter adjustment can conduct PID parameter adaptive adjustment when the expected speed changes dynamically.The control system responds quickly and has high accuracy, effectively ensuring the dynamic performance of longitudinal control,and providing reference methods and empirical basis for the development of longitudinal control strategy of vehicle auto drive system.
Keywords: vehicle engineering; automatic driving; longitudinal control; real vehicle parameter adjustment; fuzzy PID
0 引言
精准稳定的运动控制是决定自动驾驶性能的关键技术问题[1-2]。(剩余10287字)
