基于 STM32 和 OpenMV 的智能物流搬运小车设计

打开文本图片集
中图分类号:TP242.6 文献标志码:A文章编号:1006-0316(2025)09-0073-08
doi:10.3969/j.issn.1006-0316.2025.09.011
Design of Intelligent Logistics Handling Trolley Based on STM32 and OpenMV
LI Wenbo, GAO Xinbo, ZHOU Xing, YU Guanqing, MA Xinling (School of Mechanical and Power Engineering, East China University of Science and Technology,
Shanghai 200237, China)
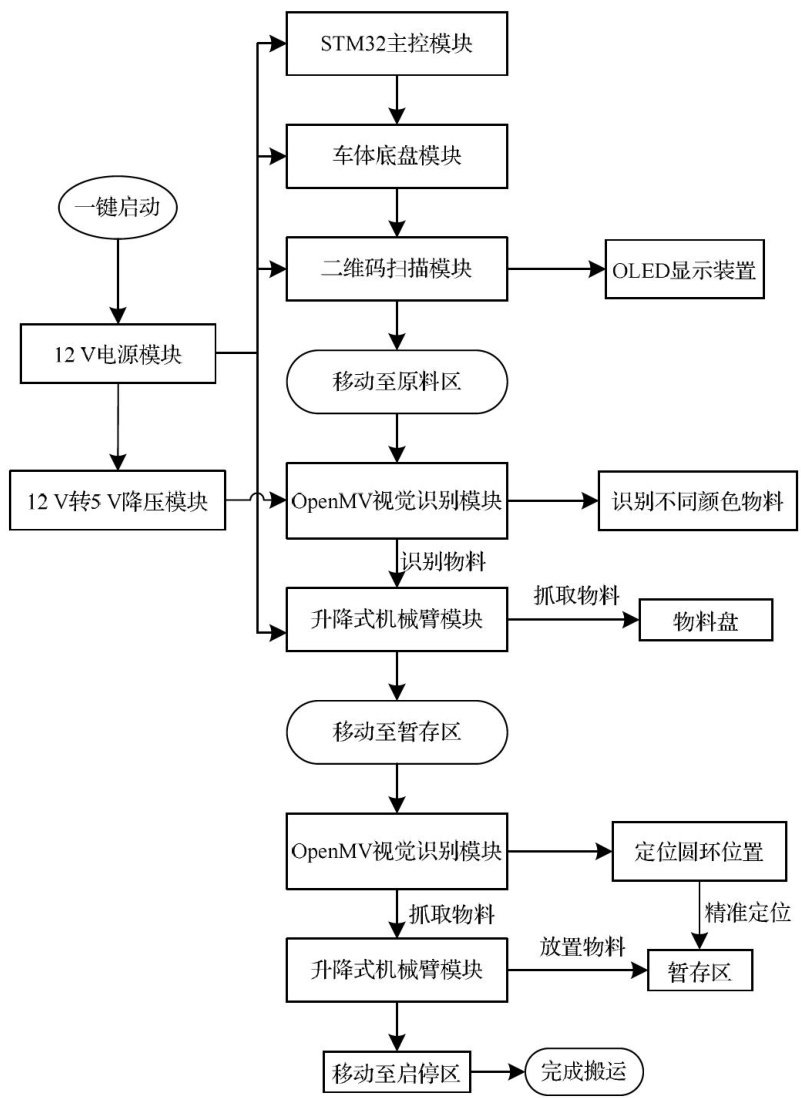
Abstract : In this paper, an inteligent logistics handling trolley based on STM32 and OpenMV is designed, aimingat solving the problems of theexisting inteligent logistics handling trolley,including insufficient visual recognition accuracy and real-time performance under disturbing conditions,as wellas significant deviation in path planning.The trolley takes STM32F103RCT6 as the core controler,and combines OpenMV visual recognition module, QR code scanning module,lifing robotic arm module and McNamee wheel chasis to realize a fully automated process from material recognition, gripping to accurate placement. The system significantly improves the accuracyand speed ofcolour recognition and positioning of materials and colour rings by performing threshold segmentation and Blob connectivity domain analysis in LAB colour space and applying thecentre-of-mass positioning algorithm and displacement calculation model. In addition,the trolly adopts layered power supply architecture and UART232 communication protocol, which efectively solves the problem of timing synchronization and data interaction among multiple modulesand ensures the high reliability and real-timeresponse capabilityof the system.Simplified experimental results show that the inteligent logistics handling trolley has significant improvement in visual recognition accuracy and path planning ability,which provides technical support for inteligent logistics handling in complex environments.
Key words : inteligent logistics handling : robotic arm ; OpenMV ;colour recognition ; precise positioning
随着人工智能与物联网技术的快速发展,智能物流搬运机器人成为工业自动化的重要装备,广泛应用于仓储[1]、医疗[2-3]、制造等领域。(剩余6502字)
