悬吊式重力补偿系统随动控制技术与实验研究

打开文本图片集
中图分类号:V443 文献标志码:A DOI:10.12305/j.issn.1001-506X.2025.03.25
Follow-up control technology and experiment research of suspension gravity compensation system
WANG Xu ,LIU Yanfang,2,*,SHE Jiayu,YUAN Qiufan³,QI Naiming1,2 (1.Schoolof Astronautics,Harbin Institute of Technology,Harbin150o01,China; 2.Suzhou Research Institute,Harbin InstituteofTechnology,Suzhou 215lO4,China; 3.AerospaceSystemEngineeringShanghai,Shanghai20ll09,China)
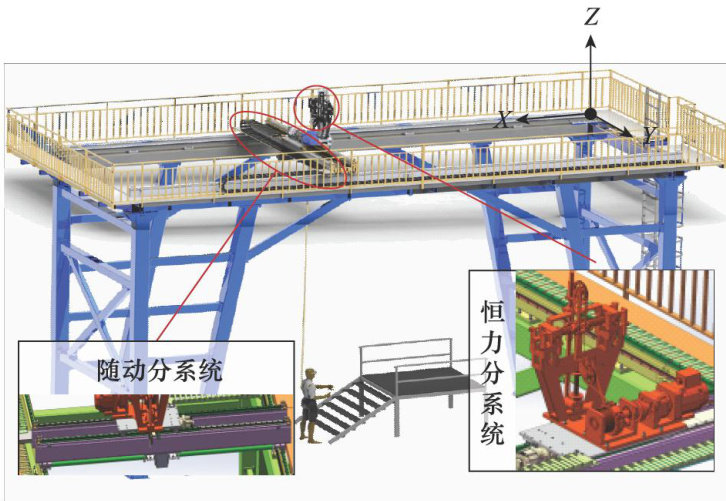
Abstract:In view of the problems of slow response to load horizontal motion,unreliable measurement of follow-up deviation,and resonance of suspension cables caused by load motion in suspension gravity compensation systems,a horizontal position following scheme based on gear guide drive and orthogonal laser inclination measurement is proposed.To achieve high-frequency and accurate measurement of follw-up deviation,laser sensors installed orthogonallyare used to measure therelative distanceof the outlet sling,and the sling angleis obtained through calibration conversion.By modeling and analyzing various parts of the system and actual measurement results,a notch filter is designed to suppress the resonance of the suspension cable, achieving high dynamicand high-precision horizontal follw-up control.Experimental results show that the follow-up system can follow various complex movements of the subjects,with a maximum folowing speed greater than 2m/s and a maximum deviation of the suspension cable not exceeding 1.4∘ ,which can meet the requirements of simulating low gravity environments in outer space.
Keywords:microgravity simulation;active two-dimensional follow-up tracking;dynamics modeling;notch filter design
0 引言
地外较小的重力环境使得航天器可以采用轻质、弱强度的结构件以降低发射成本[],但这也意味着这些航天器无法承受地球重力,难以在地面开展相关技术验证实验[2]。(剩余15958字)
