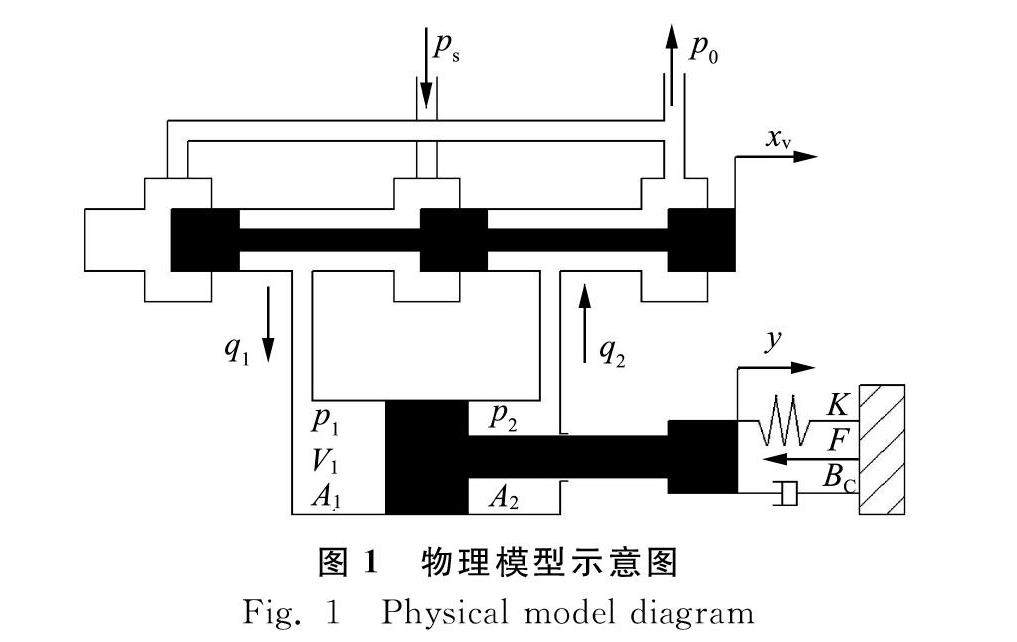
四通阀控非对称液压缸系统控制器优化设计

打开文本图片集
摘要:为优化四通阀控非对称液压缸系统的动态特性,开展控制器优化设计研究。通过AMESim-MATLAB联合仿真的方法开展模型辨识,所构建的传递函数模型的位移误差平均值仅为4.31mm,具有较高的准确度。基于伯德图进行系统的频域分析,结果表明所构建的系统是稳定的,但灵敏度和响应速度较差。设计两种最优PID控制器,基于遗传算法的最优PID控制器响应速度最快,其延迟时间、上升时间和最大超调量分别为0.152s、0.323s和3.43%,基于一阶模型延迟近似的最优PID控制器具有较高的控制精度,其延迟时间、上升时间和最大超调量分别为0.396s、0.438s和0。(剩余13055字)
