面向机器人打磨的线激光三维测量系统设计

打开文本图片集
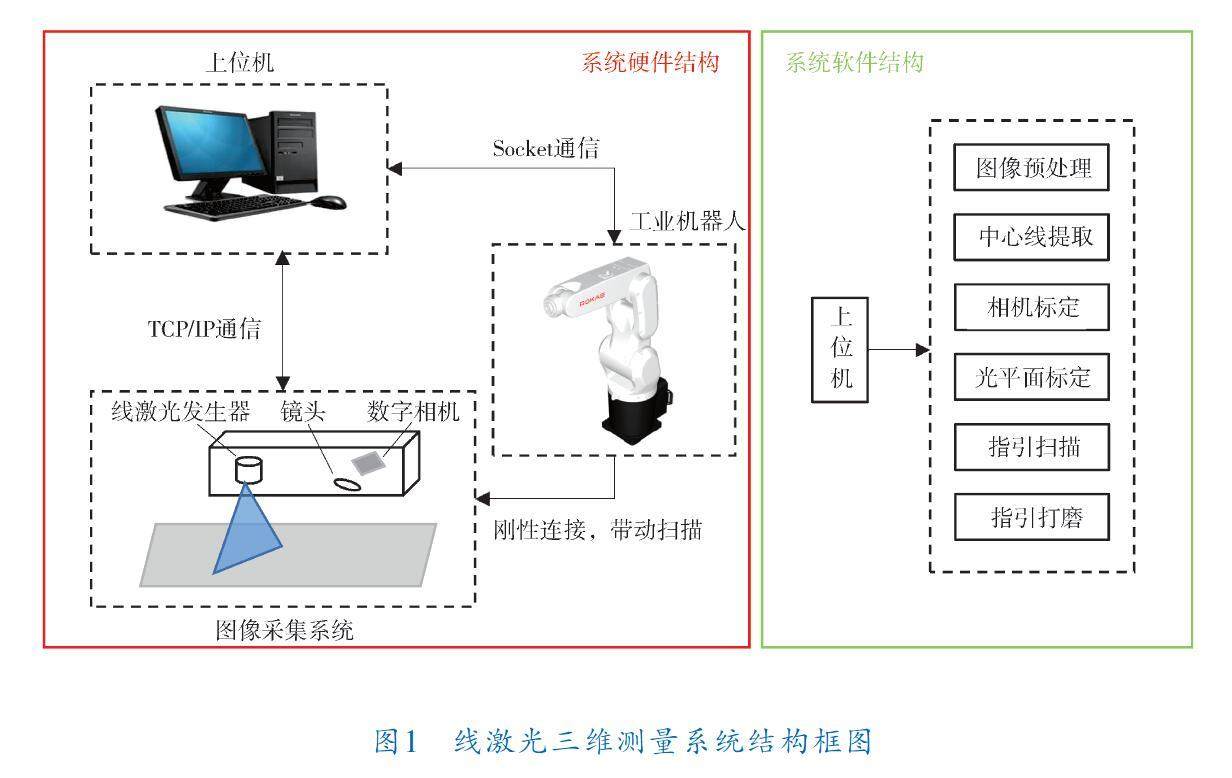
摘 要 针对机器人自动化打磨生产需求,设计线激光三维测量系统。以上位机为控制核心,选用线激光发生器与工业相机组成视觉采集模块,工业机器人作为执行机构。自主实现相机参数标定;研究线激光中心线提取算法,结合直线拟合、矩阵奇异值分解、平面拟合等数学原理,实现基于平面棋盘格标定板的光平面标定法;机械臂带动视觉模块采集图像,上位机处理视觉信息,经过灰度化、图像滤波、二值化等图像预处理步骤,提取激光中心线,结合标定结果得到工件三维数据;上位机根据工件三维信息指引机器人加工工件,实现测量、加工一体化工作站。(剩余13091字)
