图像角点与点云曲率渲染边界特征下的雷视一体标定

打开文本图片集
中图分类号:TP391.41 文献标志码:A DOI:10.13338/j.issn.1674-649x.2025.02.013
LiDAR and camera integrated calibration based on image corner points and point clouds curvature rendering boundary
ZHANG Daicong,LI Qian,YU Jilong,CHEN Wenbo,LUO Baoqi (School of Mechanical and Electronic Engineering,Xi'an Polytechnic University, Xi'an 710048,China)
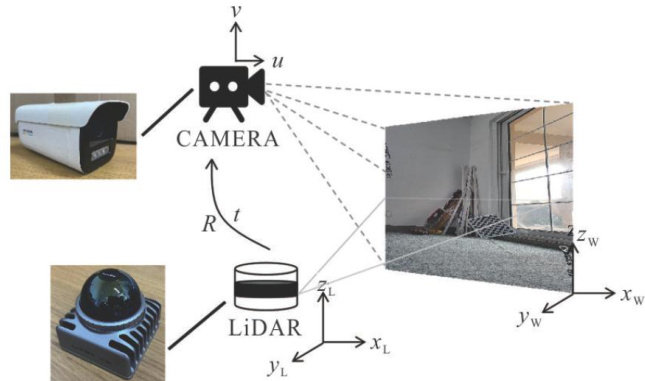
Abstract A multi-sensor perception system composed of light detection and ranging(LiDAR)and cameras must first undergo calibration before it can perform tasks such as modeling and recognition. As the scanning range of LiDAR gradually expanded and its application scenarios diversified,to ensure the flexibility of LiDAR-camera calibration in various environments,including indoor,outdoor,and long- or short-distance scenarios,the paper proposed a method that does not require calibration boards. Instead,it leverages feature points from buildings or natural scenes to calibrate the extrinsic parameters between LiDAR and cameras. This method combined curvature-rendered boundary features of point clouds to assist in feature point selection and a 2D image corner extraction algorithm,enabling convenient and efficient extrinsic parameter calibration in scenes with natural features. Experimental results show that the maximum mean error of the translation vector is 34mm ,and the maximum mean error of the rotation vector is 0.493∘ ,which meets the requirements for common centimeter-level LiDAR-camera calibration.
Keywordsmulti-sensor; LiDAR-camera calibration; image corner points; curvature rendering; light detection and ranging(LiDAR)
0引言
随着计算机视觉和机器感知技术的迅速发展,激光雷达与相机标定作为一项关键技术,在机器人[、自动驾驶[2]及三维重建[3]等领域中都起着至关重要的作用。(剩余13184字)
