单目视觉移动机器人高精度鲁棒定位方法

打开文本图片集
中图分类号: TP391 文献标志码:ADOI:10. 13338/j.issn.1674-649x.2025.02.003
High-precision and robust positioning method for monocular vision mobile robot
WANG Xiaohua,DENG Yue ,WANG Xueyu ,CHEN Weizhong (School of Electronics and Information,Xi'an Polytechnic University,Xi'an 71oo48,China)
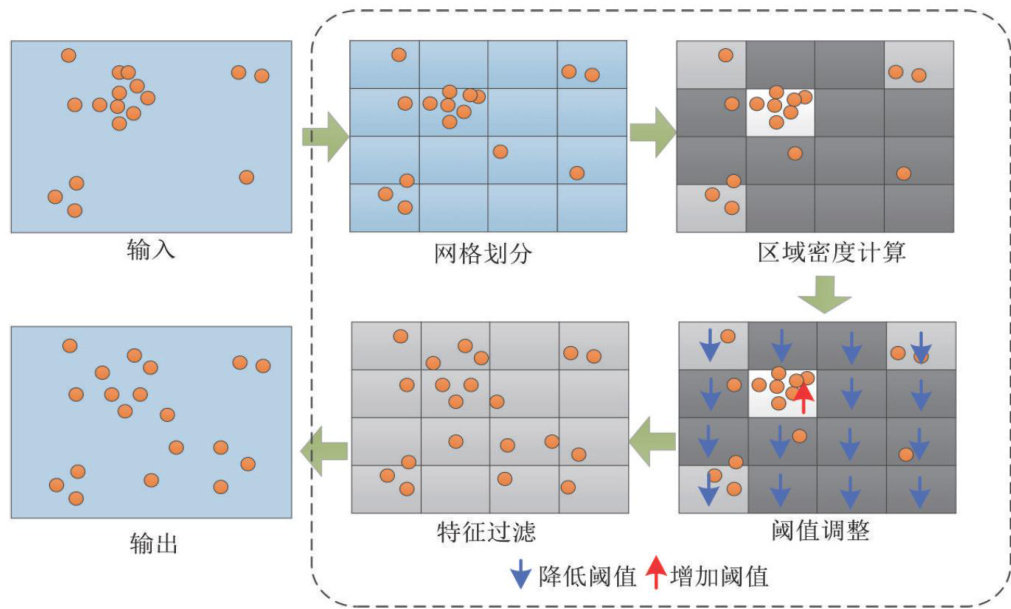
AbstractWhen mobile robots use monocular vision sensors for simultaneous localization and mapping (SLAM),they encounter numerous challenges in complex environments characterized by frequent lighting changes and sparse environmental textures,leading to inaccuracies in positioning.Therefore,this article focuses on improving the front-end and positioning components of the ORB-SLAM3 system to enhance the accuracy and robustness of monocular vision mobile robots. Firstly,we proposed a regional dynamic feature probability threshold adjustment algorithm to enhance the SuperPoint network,replacing the original ORB algorithm for image feature extraction. This step Was aimed to acquire more robust and evenly distributed visual feature points.Secondly,we introduced a common view matching strategy and dynamic window matching strategy,optimizing the feature matching and tracking algorithm of the visual front-end. This optimization significantly improved visual tracking performance in scenes with sparse textures. Finally,by combining the proposed improved algorithm with multi-sensor information fusion technology,a complete positioning system framework was constructed. An experiment was conducted using this system.The results demonstrate that the improved algorithm reduces the absolute trajectory error on the EuRoc dataset by 8.6% compared to ORB-SLAM3.In a real-world environment,the error of the robot is reduced by 33.59% compared to that before the improvement.
Keywordsmobile robot; simultaneous localization and mapping (SLAM); ORB-SLAM3; Su-perPoint;monocular vision
引言
移动机器人定位是机器人实现自主控制的基础和关键[1-2],因此基于视觉的机器人SLAM技术得到了广泛应用。(剩余12805字)
