基于LW-LoFTR的增强现实三维注册算法

打开文本图片集
中图分类号:TP391.4 文献标志码:A DOI:10.13338/j.issn.1674-649x.2025.02.009
Augmented reality 3D registration algorithm based on LW-LoFTR
SHI Hong 1,2 ,XU Wei² ,LIU Shaoqing²
(1.School of Computer Science and Engineering,Anhui University of Science & Technology, Huainan 232001,Anhui,China; 2. Institute of Energy,Hefei Comprehensive National Science Center (Anhui Energy Laboratory),Hefei 230o71,China)
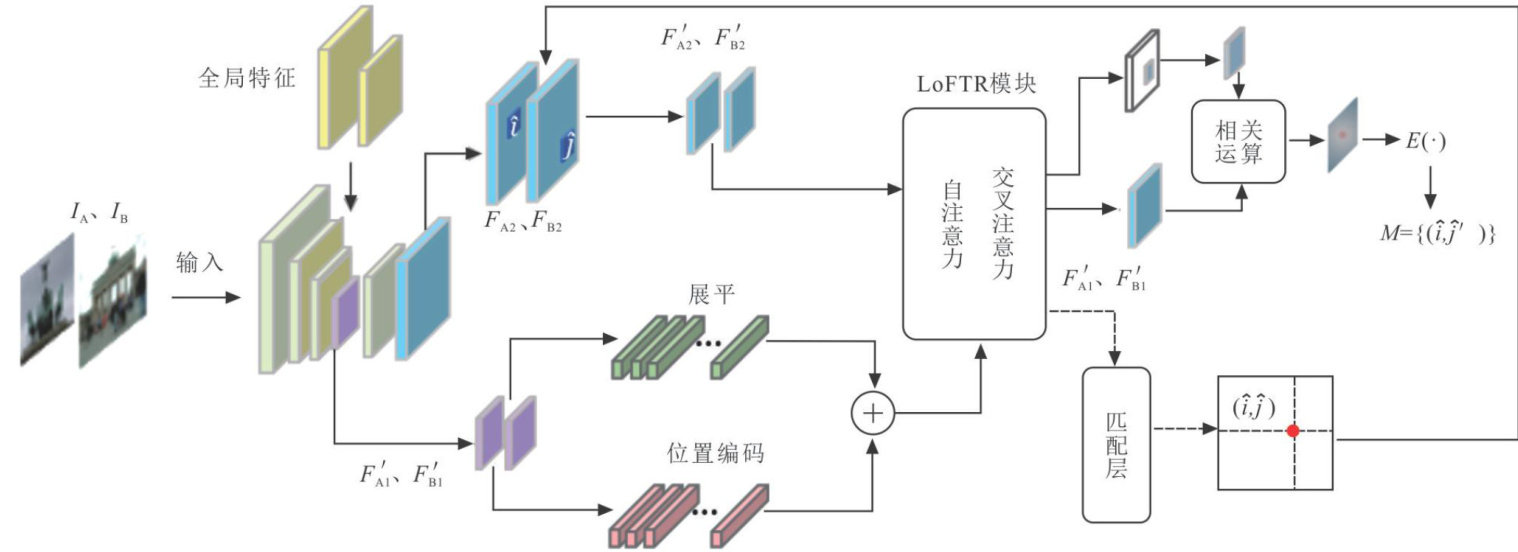
AbstractThree dimensional registration is a key step in implementing augmented reality (AR).In order to solve the problem of natural feature-based 3D registration algorithms being easily afected by the environment,inaccurate registration results,and time-consuming when used in complex scenes,the LW-LoFTR (lightweight-LoFTR) algorithm was proposed to lightweight improve the model to met the low latency requirements of AR.Firstly,depthwise separable convolution was used to reduce the number of model parameters and inference time. Secondly,a lightweight global context module was added to improve the feature interaction capability of the model and compensate for the loss of accuracy after lightweighting. Finally,the matching relationship obtained by the LW-LoFTR algorithm was used for pose calculation,completing the optimization and improvement of 3D registration,and achieving high-performance AR effects.The experimental results show that the proposed LW-LoFTR algorithm achieves an average matching accuracy of 94. 59% on the MegaDepth dataset. When the statistical error thresholds are 5∘,10∘ ,and 20∘ ,the relative pose estimation AUC (area under curve) reaches 48.85,65.56 and 78.72,respectively.The number of model parameters decreases by 43.97% ,and the inference time decreases by 48.92% . It can achieve stable 3D registration effects under changes in viewing angle,lighting,and occlusion.
Keywordsaugmented reality(AR);3D registration;lightweight;image matching;deep learning
0引言
AR技术将虚拟元素与现实环境融为一体来增强用户对世界的感知[]。(剩余13188字)
