基于FSAC多传感器赛道锥桶建图算法研究

打开文本图片集
主题词:方程式赛车激光雷达工业相机组合惯导系统RGB锥桶地图中图分类号:U469.696 文献标志码:A DOI:10.19620/j.cnki.1000-3703.20240403
Research on Cone Barrel Mapping Algorithm Based on FSAC MultiSensor Track
LiYilong1,LiGang1,DengWeiwen²,XuLong1 (1.Liaoning Universityof Technology,Jinzhou121ooo;2.Beijing Universityof AeronauticsandAstronautics, Beijing 102206)
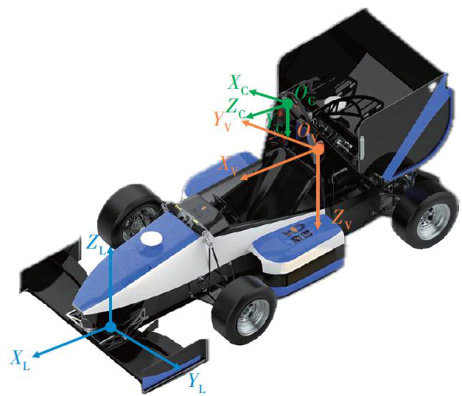
【Abstract】Forthe problem of mapping failure in the high-speed tracking and figure-eight scenariosof the Formula StudentAutonomous China (FSAC)duetothelimitedrecognitionand lowaccuracyofsingle-sensorcone detection,this paper proposesacone mapping algorithmbasedon theloosecoupling of LiDAR,industrial cameras,andacombined inertial navigation system.Byprojecting LiDARdataontothecamera cordinatesystem,the similaritybetweenthetargetdetection boundingboxes from thecamera’sdep learning framework (YOLOv5)andthe LiDARcone bounding boxes is matched.The fused point cloud,containing RGBcolor information,isthen transformed from the LiDAR cordinatesystem to themap coordinatesystem.Tereal-timevehicleposecalculatedbythecombined inertialnavigationsystemisusedtoupdatethefused cone pointcloud map.Real-vehicle comparative test results show thatthe algorithm achieves anaverage recallrateof 98.6% andanaverageprecisionof99.1%,enabling thedistinction betweentheinnerandoutertracksof theconemap,thereby enhancing the vehicle's perception,anticipation capabilities and path planning efficiency.
KeyWords:Formula RacingCar,LiDAR,Industrial Cameras,Combined InertialNavigation Systems,RGB Cone Barrel Maps
【引用格式】李逸龙,李刚,邓伟文,等.基于FSAC多传感器赛道锥桶建图算法研究[J].汽车技术,2025(5):29-38. LIYL,LI G,DENG W W,et al. Research on Cone Barel Mapping Algorithm Based on FSAC Multi-Sensor Track[J]. Automobile Technology,2025(5): 29-38.
1前言
目前,自动驾驶技术已成为全球汽车产业转型升级的核心驱动力和战略制高点,中国大学生无人驾驶方程式大赛(Formula Student AutonomousChina,FSAC)依托高校,推动自动驾驶技术的创新实践。(剩余12758字)
