基于深度网络的无人机视觉跟踪目标识别算法研究

打开文本图片集
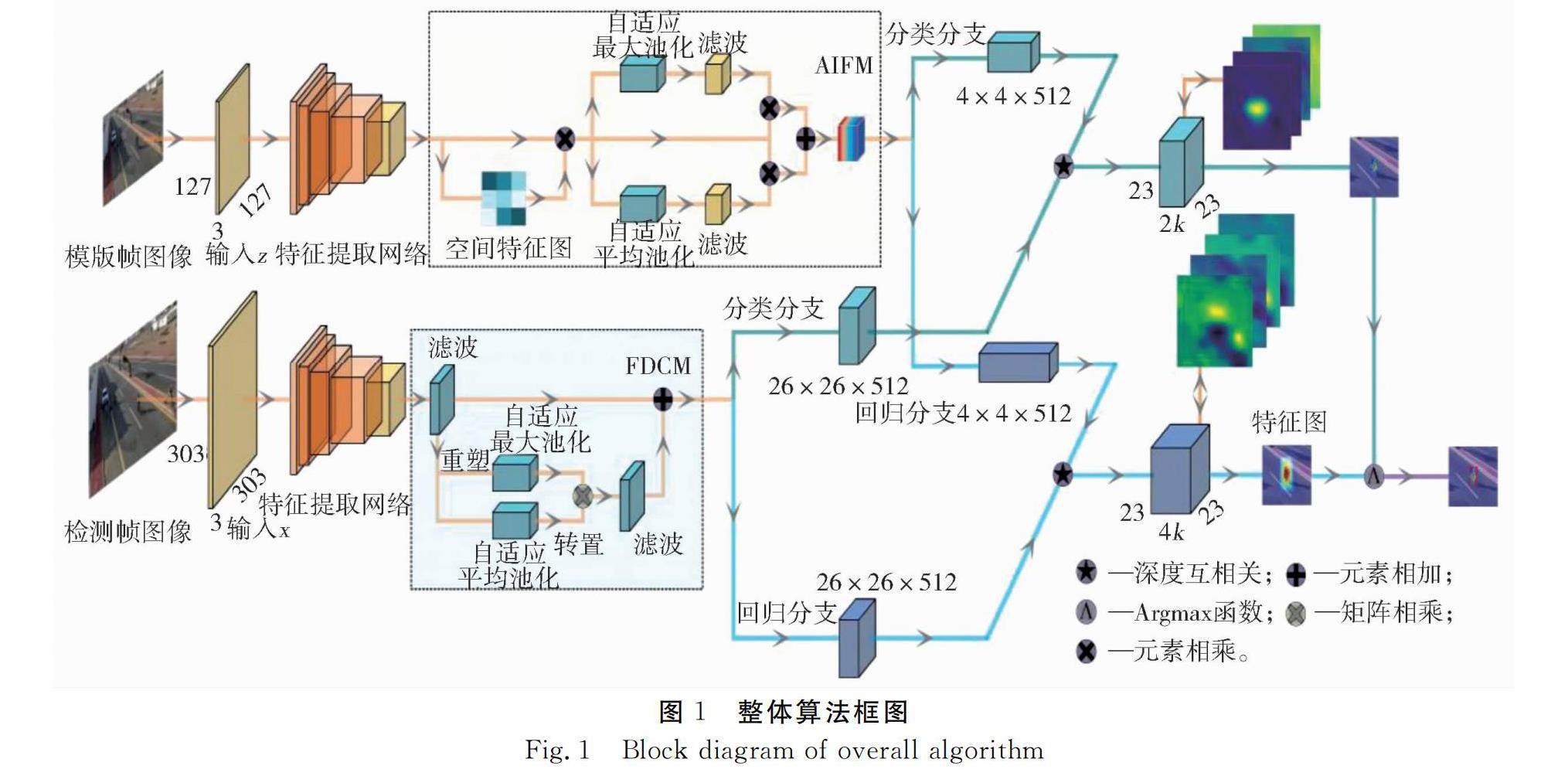
摘 要:为了解决无人机视觉跟踪目标识别算法在复杂环境下因目标快速移动、光线短时间变化、物体遮蔽以及目标形态变化等因素产生的跟踪识别准确性差的问题,提出一种基于深度全卷积孪生网络的目标识别及跟踪算法,通过放大卷积神经网络的宽度、全卷积孪生网络跟踪算法的特征提取环节,增加回归算法强化识别目标外形轮廓的准确度,提取模版帧和检测帧的特征;采取在线的深度网络跟踪算法有缘特征深度卷积模块,结合注意力信息融合,将初始帧的目标视为固定模版,应用高置信度更新算法计算动态模版,在线实时跟踪过程中,采取傅里叶快速变化识别固定模版与动态模版的目标变化值,将依据颜色特征得到目标的极大似然概率图与前期提取双模版的深度特征进一步融合,抑制背景的同时,实现目标跟踪。(剩余9211字)
