注册帐号丨忘记密码?
1.点击网站首页右上角的“充值”按钮可以为您的帐号充值
2.可选择不同档位的充值金额,充值后按篇按本计费
3.充值成功后即可购买网站上的任意文章或杂志的电子版
4.购买后文章、杂志可在个人中心的订阅/零买找到
5.登陆后可阅读免费专区的精彩内容
打开文本图片集
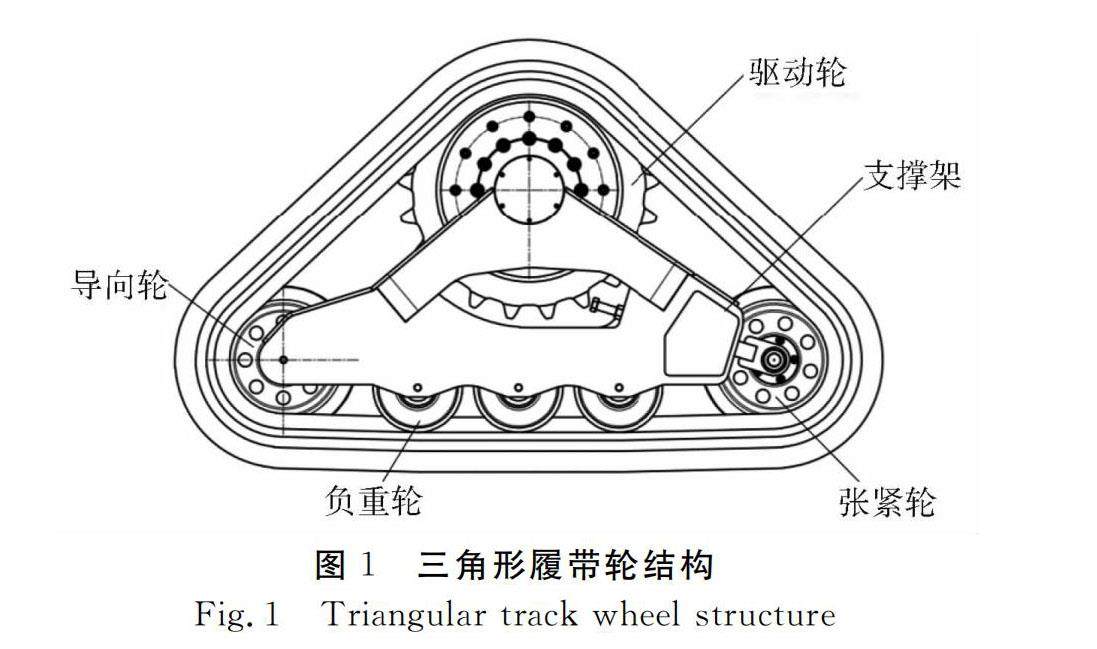
摘 要:针对传统巡检机器人行走机构对非结构化地形适应性差的问题,设计了轮履复合巡检机器人行走机构,并进行动态仿真分析。所设计的轮履复合巡检机器人行走机构前轮采用三角形履带,对地面损伤少,非结构化地形适应性好;后轮采用普通圆形车轮,降低机器人移动能耗。采用理论方法对所设计的轮履复合巡检机器人行走机构的爬坡性能以及越障性能进行分析,获得了理论上的最大爬坡度、越过垂直障碍物最大高度以及通过沟槽障碍物最大宽度。(剩余7674字)
登录龙源期刊网
购买文章
轮履复合巡检机器人行走机构的设计及动态仿真分析
文章价格:5.00元
当前余额:100.00
阅读
您目前是文章会员,阅读数共:0篇
剩余阅读数:0篇
阅读有效期:0001-1-1 0:00:00