一种肌腱驱动预充气软体管道机器人的设计

打开文本图片集
中图分类号:TP242 文献标志码:A文章编号:1006-0316(2025)12-0068-08
doi:10.3969/j.issn.1006-0316.2025.12.010
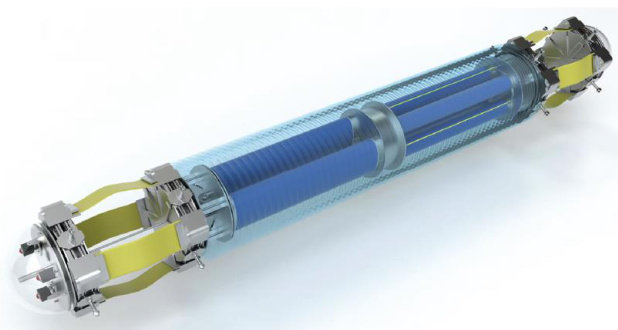
Abstract: Conventional in-pipe robots have developed relatively maturely in terms of structure and functionality.However,certain rigid structural components exhibit limited flexibility,and potential rigid colisions may generate electrical sparks, posing a safety hazard when pipeline gas composition is unstable.This paper proposes a structural design scheme fora modular,rigid-flexible coupled,and tendon-driven pre-inflated soft in-pipe robotbasedon bionic principles.The study establishes atheoretical model for the tendon-like bionic pre-inflated airbag,validatedvia finite element analysis.This model effectively integrates the synergistic advantages of rigid and flexible structures.The design employs a modular architecture fusing rigidity and flexibility,incorporatingadaptive diameter-changingand visual inspection capabilities.Through the coordinated actionof the bionicpre-inflated airbagand siliconebands,the central flexible driving moduleachieves low-friction "extend-anchor" locomotion,significantly enhancing adaptability and traversability within complex in-pipe.The head and tail sections utilize rigid diameter-changing modules basedona double-rocker slider mechanism, which enables adaptive pipe diameter adjustment while ensuring structural stability and effectively improves pipeline operation eficiency. The design fully leverages the unique advantages of flexible mechanisms incomplex pipeline environments,oferinganovel solution toaddressthe adaptability limitations of traditional in-pipe robots.
Key words ∵ in-pipe robot ;bionics ; soft ; finite element analysis (FEA)
管道是多个领域的关键基础设施,全球各行业在役管道总长度超过230万公里[1]。(剩余5998字)
