时滞对半主动悬架不同控制策略的影响

打开文本图片集
中图分类号:U461.1 文献标志码:A
DOI: 10.7652/xjtuxb202506020 文章编号:0253-987X(2025)06-0198-11
The Influence of Time Delay on Different Control Strategies of Semi-Active Suspension
YU Yuewei,SONG Yunpeng,LI Bo,ZHAO Leilei,JIAO Guokai (Schoolof Transportationand VehicleEnginering,Shandong UniversityofTechnology,Zibo,Shandong2550oo,China)
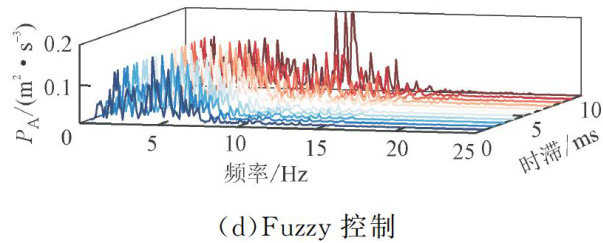
Abstract: In order to reveal the influence of time delay on the continuous damping control (CDC) suspension system’s control strategy and facilitate the selection of control strategies, the differences between different control strategies for CDC semi-active suspensions under time delay effect were explored by combining theoretical analysis, simulation and experimental research. Firstly,a mechanical constitutive model for CDC dampers was established based on data-driven modeling method,and the model was verified through bench test. Then,based on the two degrees of freedom vehicle semi-active suspension model, four representative control strategies were developed, including the sky-hook damping control, linear quadratic optimal control,sliding mode variable structure control,and fuzzy control. Finally,a vehicle simulation model of CDC semi-active suspension closed-loop control system with time delay effect was established by using Matlab/Simulink and CarSim joint simulation,and the dynamic characteristics of different control strategies of CDC semi-active suspension under time delay effect were analyzed. The results showed that when the time delay was small,the four control strategies could still effectively control the system. With the increase of time delay,the sky-hook damping control and sliding mode variable structure control obviously deteriorated,while the linear quadratic optimal control and fuzzy control changed little. Overall, the comprehensive performance of the fuzzy control strategy is optimal under the effect of time delay factors.
Keywords: semi-active suspension; continuous damping control damper; mechanical constitutive model;control strategy;time delay effect
阻尼连续可调(CDC)半主动悬架能够根据行驶工况实时、连续调节悬架阻尼,既能够有效解决被动悬架中存在的乘坐舒适性与行驶安全性之间的固有矛盾,又能以较高的性价比媲美主动悬架,在汽车智能底盘与集成控制领域得到了广泛关注,成为车辆半主动悬架研究领域的热点[1-3]]
近年来,为了有效提升CDC半主动悬架的实际控制效果,诸多学者在其控制策略方面开展了大量研究,但大都没有考虑时滞因素的影响[4-7]。(剩余15258字)
