智能车辆自适应轨迹跟踪控制方法研究

打开文本图片集
Research on adaptive trajectory tracking control method for intelligentvehicle
ZHANG Shuo1,LIXiao1,CHENYisong*1,ZHAO Xuan1,YU Qiang1,YUMan2
(1.SchoolofAutomobile,Chang'anUniversity,Xi'an7oo64,China; 2.SchoolofConstructionMachinery,Chang'anUniversity,Xi'an7loo64,China)
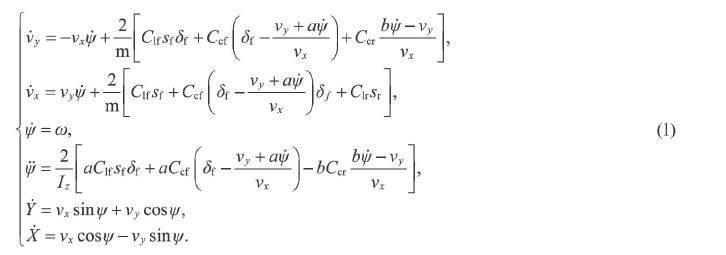
Abstract:Aimingat the problem ofpoor trajectory tracking accuracyand handling stabityof inteligent vehicles under variable speedand variableroadadhesioncoeficientconditions,anadaptive trajectorytracking control method based on model predictive control (MPC)was designed.Based on the lateralforce sliding modeobserver andtheinverse model of magic tire,the tireequivalent cornering stifness estimationmethod was designed to corecthe dynamic model parametersin real time.Adynamic predictive time-domaincontrol strategy that took intoaccount the road adhesion coeficient and driving speed was developed,andanadaptive MPC trajectory tracking controler wasestablished.The effctiveness of theadaptive model predictive control method was verified by Simulink-CarSim joint simulation underthe conditions of double lanechange with variable speedand roadadhesion coefficient compared with the traditional MPC control method.The results show that compared withthe traditional MPCcontrolmethod,thecontrol stabilityof theproposed method isimprovedathighspeed and variable speed on the highadhesion coefficient road,and the average yaw speed is improved by 19.82% ataslightsacrificeof trackingaccuracy.Theaverage lateral ofset and yawvelocityare reduced by 84.90% and 46.23% respectively when driving at mediumand low speed on the road surface with variable adhesion coefficient,which caneffectively improve the trajectory tracking controlaccuracyand handling stability.
Keywords:trajectorytracking; model predictivecontrol (MPC);tire cornering stifnesses estimation;variable prediction time domain
轨迹跟踪技术在保证智能汽车行驶安全性与乘客乘坐舒适性的前提下,能够准确地跟踪期望轨迹[1]。(剩余13143字)