基于多柱特征融合的点云目标检测方法

打开文本图片集
Point cloud object detection method based on multi-pillar feature fusion
FU Zhihan 1,2 , LI Zhiyi,DAI Chuang², ZHANG Lijuan2*
(1. School of Computer Science, Nanjing University of Information Science and Technology , Nanjing 210044,China; 2.School of Internet of Things Engineering,Wuxi University,Wuxi 2l4lO5,China; College ofInstrument Science and Electrical Engineering, Jilin University, Changchun l3Ool2,China)
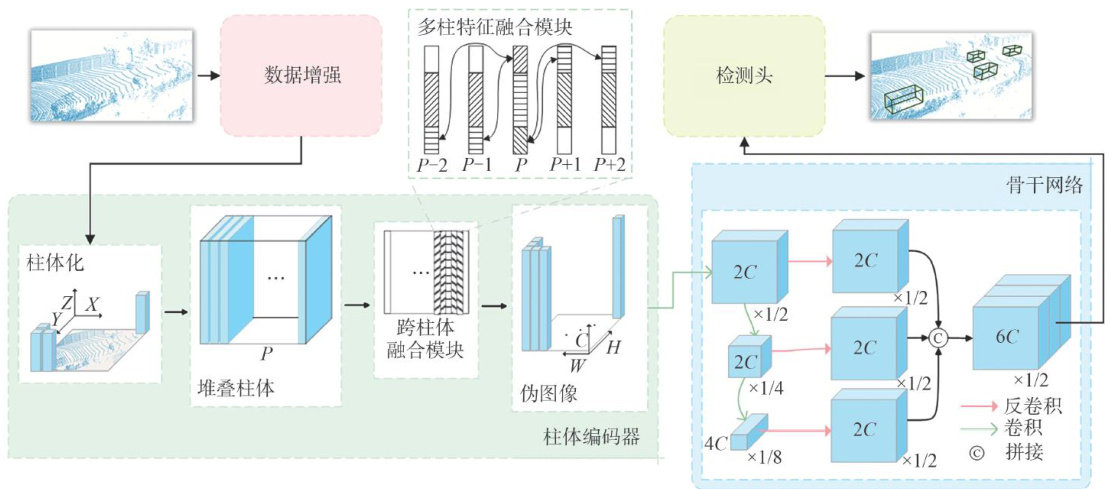
Abstract:To address the challenge of balancing accuracy and real-time performance in existing 3D point cloud object detection models within autonomous driving scenarios,this paper proposes an eficient point cloud object detection method.The aim is to improve detection accuracy while meeting the requirements for real-time deployment on edge devices,thereby promoting the application development in autonomous driving and inteligent transportation fields.Based on a pillar-based point cloud detection framework,a multi-pillar feature fusion model is designed. The model enhances the pillar feature representation ability by introducing point cloud variance features and positional encoding. A multi-pillar feature fusion module is proposed to improve the learning of contextual information between adjacent pillars,and a backbone network combining residual connections and Dropout regularization is used to optimize feature extraction. Furthermore,a point cloud data augmentation strategy is improved by mixing point clouds of same-category objects to enhance the model's generalization ability to complex scenes.Extensive experiments on the dataset demonstrate that the proposed method achieves a 3D mAP of 68.93 and a BEV mAP of 75.02. The model maintains an inference speed of 55.65 FPS. It also demonstrates excellent performance on the dataset. The proposed model achieves a balance between detection accuracy and real-time performance through multi-pilar feature fusion and an optimized data augmentation strategy,showcasing its application potential in autonomous driving scenarios. Future work could further optimize the model architecture to adapt to embedded system deployment to meet practical application needs.
Key Words: 3D object detection;point cloud;autonomous driving;;
1引言
激光雷达是自动驾驶领域最常用的传感器之一,也是机器理解三维场景不可或缺的手段。(剩余17572字)
