超宽带多锚点弹性辅助的视觉/惯性紧耦合导航

打开文本图片集
Ultra-wideband multi-anchor resilient-assisted vision/inertial tightly coupled navigation
LUO Haolong 1,2 ,LI Jiansheng1,XU Zhitao³,WANG Li1, ZHANG Shitian 4 ,LI Guangyun1*
(1. School of Geospatial Information, Information Engineering University, Zhengzhou 45Ooo1,China;
2.State Key Laboratory of Geo-Information Engineering,Xi' an 71O054,China;
3.School ofComputer Science and Engineering,Central South University,Changsha 41Oo83,China;
4. The 22nd Research Institute, China Electronics Technology Group Corporation, Qingdao 266107,China) * Corresponding author,E-mail: guangyun_li_chxy@l63.com
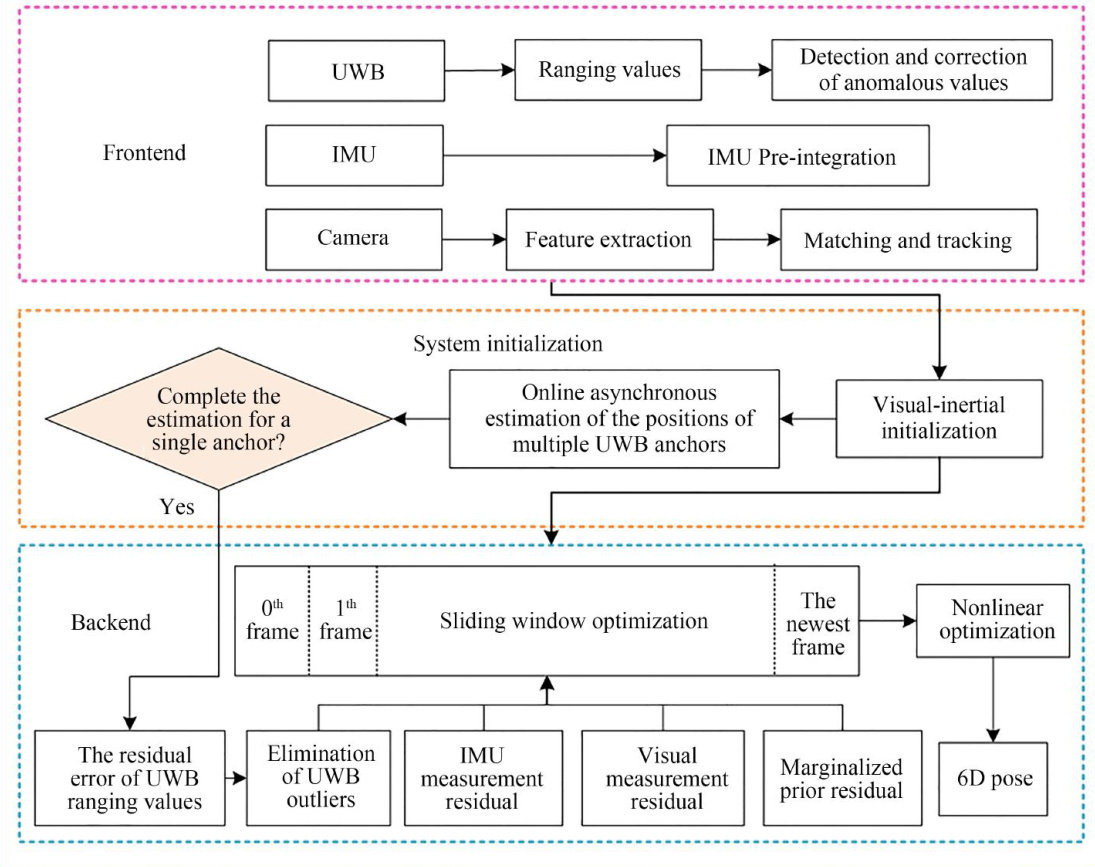
Abstract:Due to the limitations of distance measurement from a single ultra-wideband (UWB)anchor, which provides only one-dimensional information,significant enhancement in system accuracy and robustness is constrained.To address this issue,a UWB multi-anchor resilient-asssted vision/inertial tightly coupled navigation method was proposed,which obviates the necesity of pre-obtaining UWB anchor positions and demonstrates universal applicability. Initially,based on the plug-and-play concept,an online asynchronous po sitioning estimation method was introduced to effectively and timely utilize UWB anchor information.Subsequently,a resilient factor graph optimization framework was employed to construct a tightly coupled factor graph model for vision-inertial UWB fusion,facilitating tightly coupled navigation that integrates information from vision,inertialsensors,and multiple UWB anchors.The proposed method was validated using both the open-source VIRAL dataset and datasets collected from real-world environments. Experimental results indicate that,in comparison to state-of-the-art open-source algorithms VINS-MONO and VIR-SLAM,the positioning accuracy of the proposed method improved by an average of 30.61% and 23.19% ,respectively. These findings underscore that the UWB multi-anchor resilient-assisted vision/inertial tightly coupled navigation method provides enhanced positioning accuracy and improved robustness.
Key Words: ultra-wideband multi-anchor;outlier detection;anchor position estimation; factor graph opti-mization; tightly coupled navigation
1引言
全球导航卫星系统(GlobalNavigationSatel-liteSystem,GNSS)在导航领域发挥了不可替代的重要作用[1-3]。(剩余16410字)