强环境噪声下的双目视觉受电弓轨旁异常检测

打开文本图片集
Binocular vision-based trackside pantograph anomaly detection under strong environmental noise
ZHAO Jin 1,2 , GUO Yin,YIN Shibin 2 , GUO Lei², ZHU Jiguil* (1. State Key Laboratory of Precision Measuring Technology and Instruments, Tianjin University, Tianjin 300072,China; 2.ISVision(Hangzhou) Technology Co.,Ltd.,Hangzhou 310o52,China) * Corresponding author,E-mail: jiguizhu@tju. edu. cn
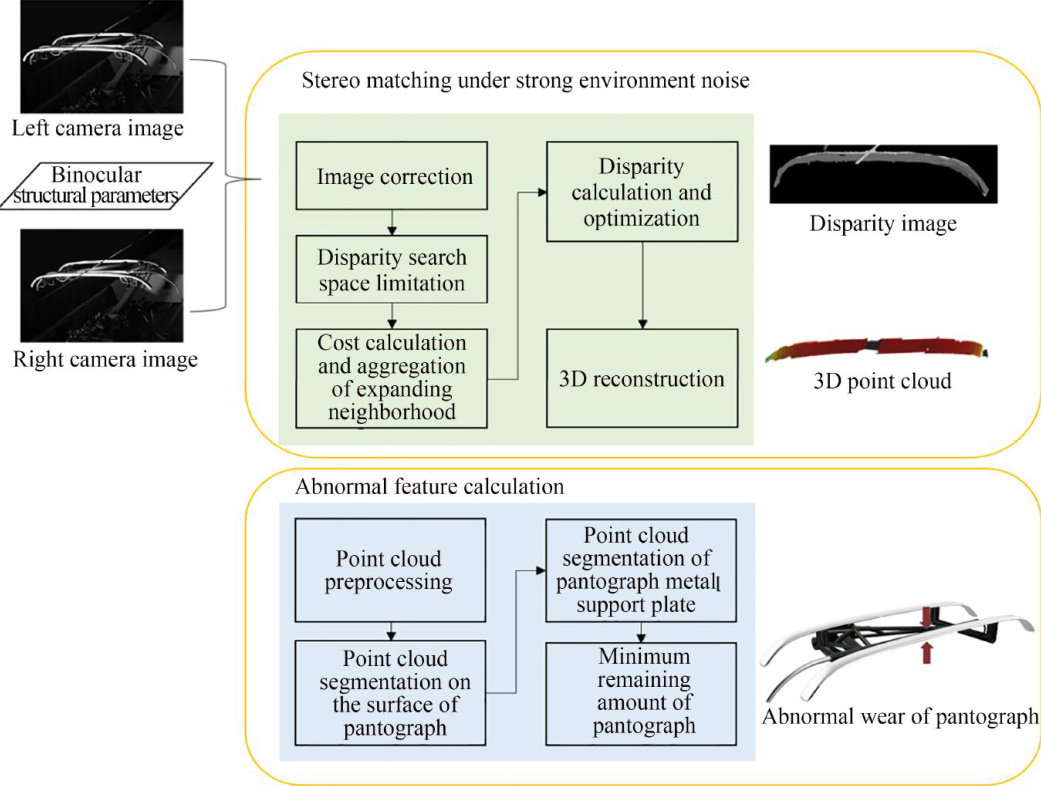
Abstract: To address the challnge posed by significant environmental noise that disrupts the parameters of binocular vision systems in pantograph anomaly detection-thereby compromising the accuracy of disparity maps and detection precision-an improved stereo matching method was developed and integrated with anomaly feature detection for this application.This study employs an expanded neighborhood cost calculation and weighted cost aggregation to mitigate the inaccuracies associated with binocular epipolar geometry induced by environmental noise or structural alterations.The local binary pattern method was utilized to compute the cost distribution function,rendering the algorithm applicable for fixed scene detection.Additionally,the disparity search space was constrained to enhance eficiency for real-time trackside detection.
Subsequently,abnormal feature detection was conducted on the reconstructed 3D point cloud to derive measurement outcomes.The eficacy of this approach was validated within a pantograph anomaly detection systemat railway stations.Experimental results indicate that the proposed algorithm enhances time efficiency by over 30% and measurement accuracy by more than 60% when compared to conventional algorithms,thus effectively addressing the issues of low efficiency and insuficient accuracy in rail transit onsite detection equipment.
Key words: pantograph inspection; stereo matching;anomaly detection; disparity optimization; 3D re-construction
1引言
轨道交通作为现代城市公共交通系统的重要组成部分,在人们的日常生活中扮演着愈发重要的角色。(剩余15766字)