基于双目eye in hand系统的多角度树干位姿估计方法

打开文本图片集
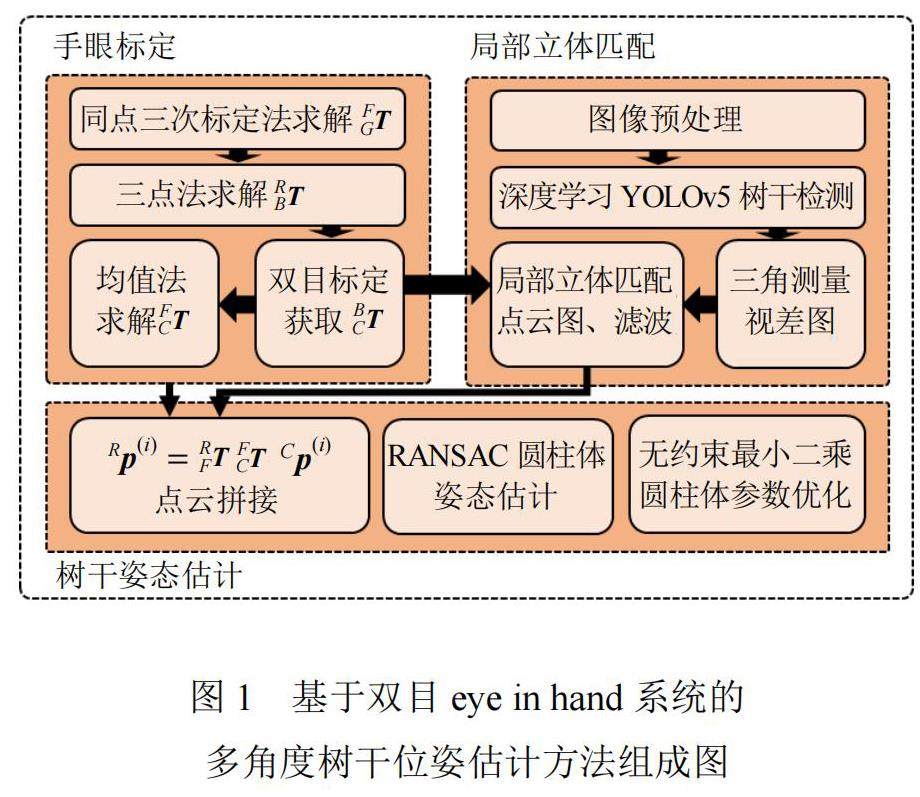
摘要:针对采摘机器人自主行走导航过程中,难以准确定位其与果树之间的相对位置,难以准确估计果树树干姿态的问题,提出基于双目eye in hand系统的多角度树干位姿估计方法。利用YOLOv5深度学习方法与半全局块匹配算法识别树干并生成局部点云;利用半径滤波和体素滤波减少树干点云数据;利用闭环式手眼标定方法对双目eye in hand系统进行标定,并对同一树干多角度相机位置的点云数据进行拼接;利用随机抽样一致(RANSAC)算法与无约束最小二乘法估计并优化树干的位置和姿态,获取树干的圆柱体参数。(剩余7746字)
