基于机器视觉的香蕉果柄识别及采摘试验研究

打开文本图片集
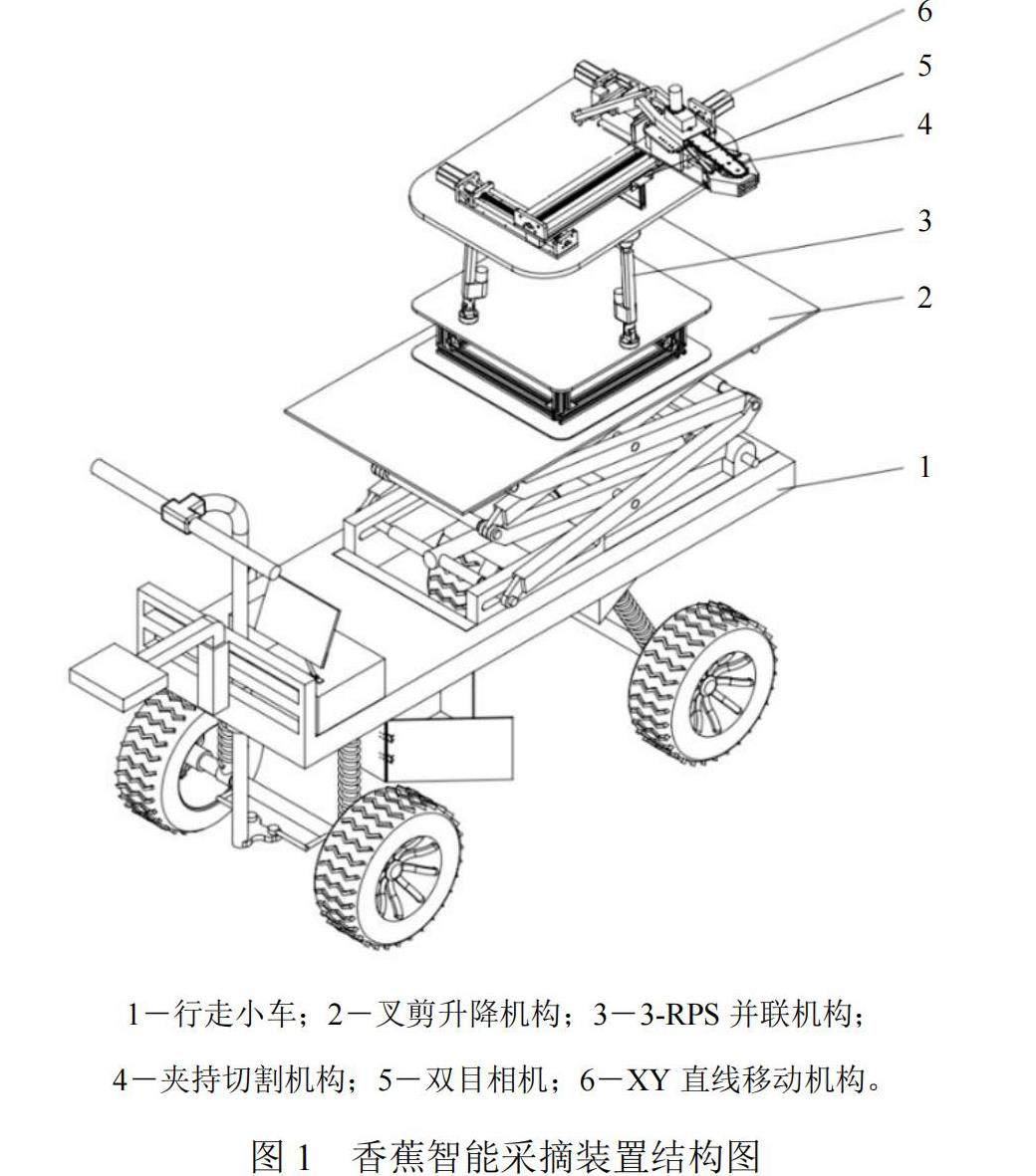
摘要:香蕉采摘是一个耗时费力的作业过程。为了实现香蕉的自动化采摘,首先,设计了一款香蕉智能采摘装置,主要包括叉剪升降机构、3-RPS并联机构和XY直线移动机构等,通过控制这3个机构的运动变化,满足其搭载的末端执行机构适应香蕉果柄的空间随机性要求;然后,搭建双目相机视觉识别系统,采用YOLOv5算法识别香蕉果柄,选择检测框的中心位置为采摘点;接着,根据采摘点位置反求3-RPS并联机构的位姿,驱动切割机构对香蕉果柄定位,完成香蕉串的自动采摘;最后,研制了香蕉智能采摘装置样机,开展采摘试验。(剩余8922字)
