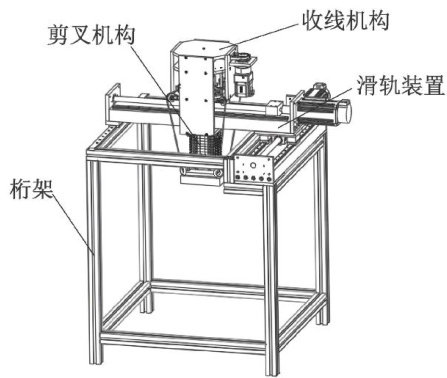
基于四绳并联驱动的无源剪叉式起重机构设计

打开文本图片集
中图分类号:TP122 文献标志码:A
Abstract:Inviewteproblemthatthetraditionalfour-ropecraneispronetoswingingduringthelftingprocesshasisficient anti-interferenebilityichftstoeratietydcuracyovelfingmehsmwihpaivesissmech therigidupporthasbndsiged.Firstlystartingfromstablishngthestaticmodeltefouropecrane,itisexpoundedthathe four-ropesystemcanefectivelydistributetheload,reducetheswingingamplitude,improvethesafety;then,byintroducingthe synchronousretractingmechanismtesissorliftingmechanism,testabilityprecisecontrolabiltytecaneareotiized; moreover,byadoptingtheinematicanalysismethodstheEuleranglemethodthetitudetransformationmatrix,theelashp betweentheropelengththepositionisderived,providingtheoreticalsupportforitsprecisecontrol.Inaddition,thestructural improveentmechanicalstructureanalysisthescissormechanismarecariedouttoenhanceitsanti-interferenceability elongationeffect.Theresultsthesimulationanalysistheprototypeverificationtestshowthatthefsetisreducedby 87.2% , the inclination is reduced by 92.03% ;thisdesign can effectively overcome the problems the traditional four-rope crane, significantlyimproveitsstabilityanti-interferenceability,verifytheeffectivenesssuperioritythisdesign.
Keywords:new-typeliftingmechnismfouropesystem;statics;kiematicaalysis;sisormchanismsimulationanalsabilty
绳驱动广泛应用于自动化、机器人、起重机等领域,研究重点是工作空间的计算、绳索张力的分布计算、机械结构的设计和控制器的开发[1]。(剩余11800字)
