基于U-Net的肉鸽养殖场机器人视觉导航路径识别方法

打开文本图片集
DOI: 10.13733/j.jcam.issn.2095-5553.2023.10.031
朱立学, 莫冬炎, 官金炫, 等. 基于U-Net的肉鸽养殖场机器人视觉导航路径识别方法[J]. 中国农机化学报, 2023, 44(10): 217-223
Zhu Lixue, Mo Dongyan, Guan Jinxuan, et al. Path recognition method of robot visual navigation for meat pigeon breeding farm based on U-Net [J]. Journal of Chinese Agricultural Mechanization, 2023, 44(10): 217-223
摘要:
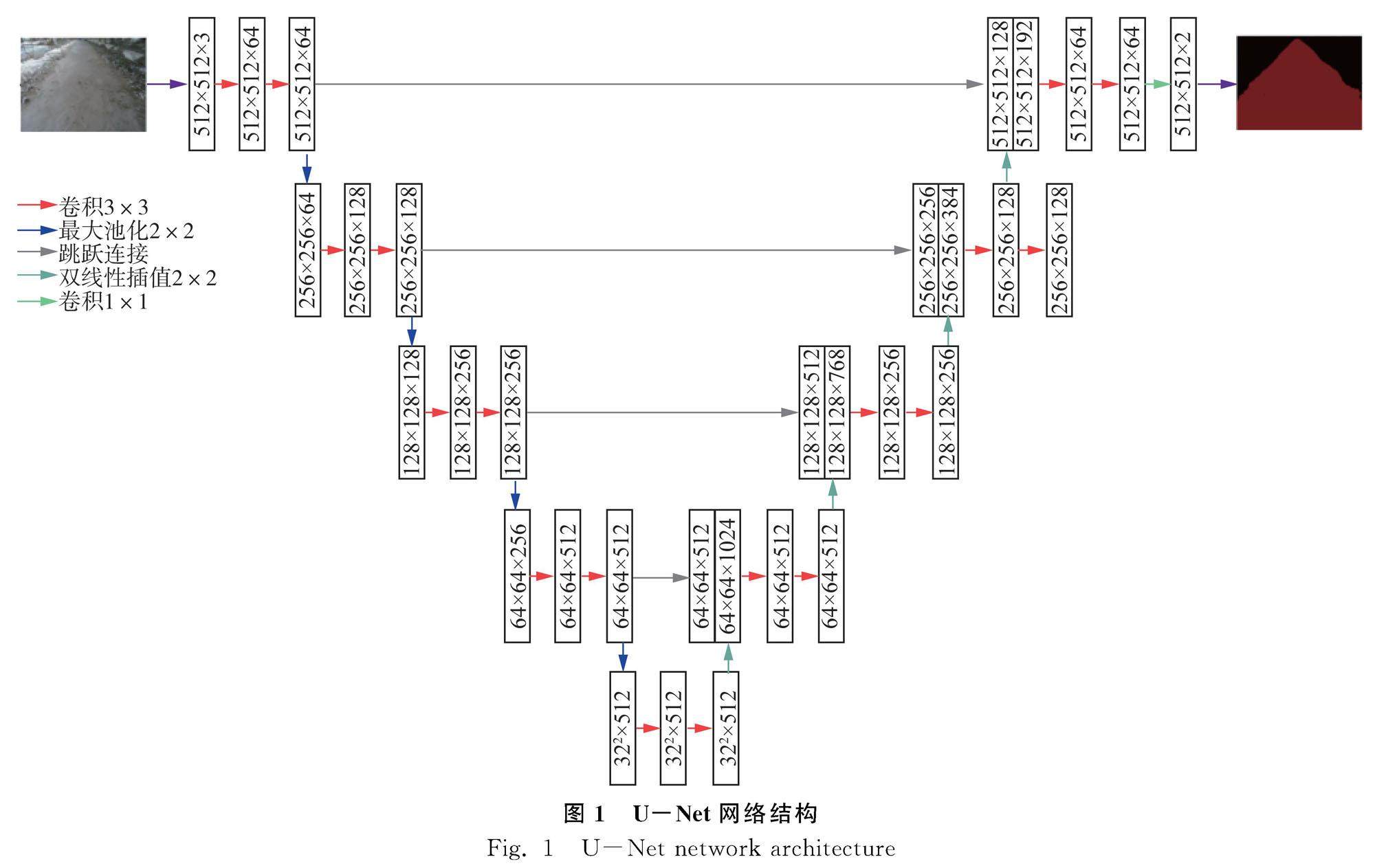
针对视觉导航在室内养殖场环境中面临的道路主干部分与背景环境难区分、鸽毛鸽粪的干扰等问题,提出一种基于U-Net网络的肉鸽养殖场视觉导航路径识别方法。(剩余13449字)