基于视觉定位的串并混联型百香果采摘机器人研究

打开文本图片集
DOI: 10.13733/j.jcam.issn.2095-5553.2023.10.029
张日红, 欧炬基, 丁力行, 等. 基于视觉定位的串并混联型百香果采摘机器人研究[J]. 中国农机化学报, 2023, 44(10): 209-216, 244
Zhang Rihong, Ou Juji, Ding Lixing, et al. Research on series parallel hybrid passion fruit picking robot based on vision positioning [J]. Journal of Chinese Agricultural Mechanization, 2023, 44(10): 209-216, 244
摘要:
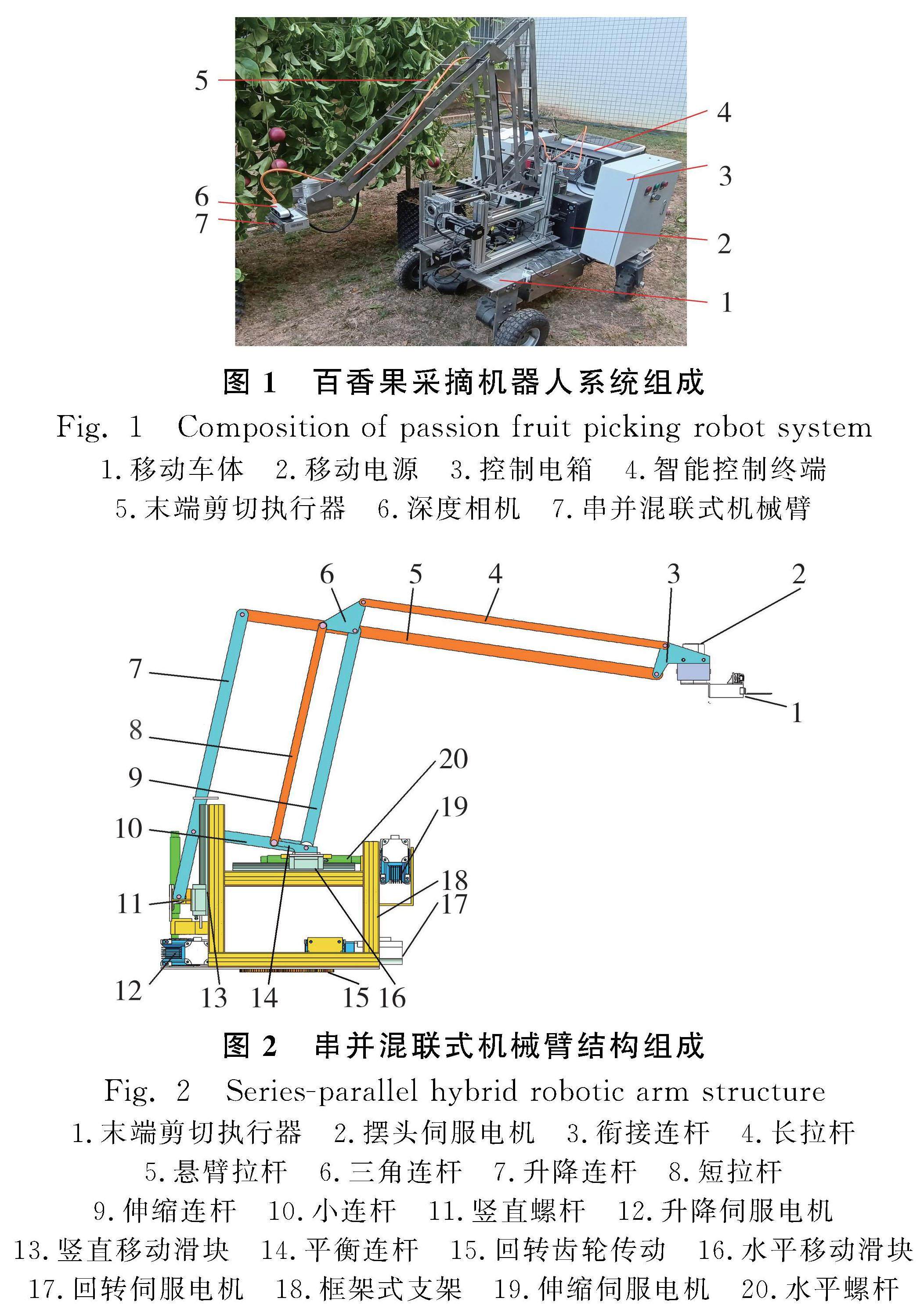
针对垂帘式种植工艺的百香果,研制串并混联型采摘机器人。(剩余16688字)