基于改进点线特征与惯性传感单元融合的SLAM算法

打开文本图片集
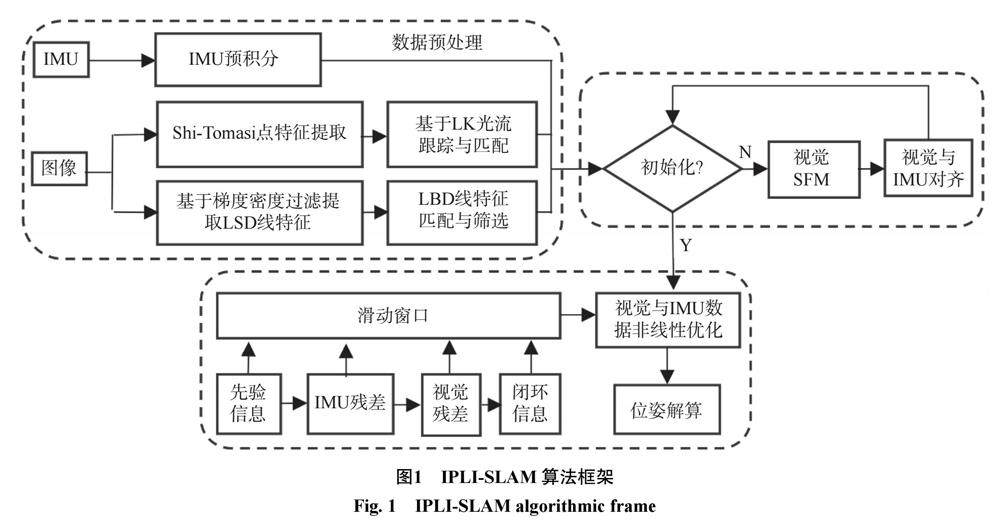
摘要:针对传统同步定位与建图(SLAM)算法在密集环境中过度提取线段的问题,提出1种基于改进点线特征与惯性传感单 元(IMU)紧耦合的 SLAM 算法,即 IPLI-SLAM。在数据预处理阶段采用 Shi-Tomasi 特征进行点特征提取并使用 LK (Lucas- Kanade)光流进行跟踪和匹配;引入线特征,在像素梯度过滤机制的基础上改进直线段检测(LSD)提取算法,筛选过滤线特征密集区域;将视觉点线信息与 IMU 紧耦合后加入后端,提高算法精度,最后将 IPLI_SLAM 算法在数据集 EuRoc 与实际场景下 进行测试验证。(剩余14945字)
