相对位姿与姿态池优化的类级别6D姿态估计模型

打开文本图片集
中图分类号:TP391 文献标志码:ADOI:10.12475/aie.20250602
本文引用格式:,,,等.相对位姿与姿态池优化的类级别6D姿态估计模型[J].自动化与信息工程,2025,46(6):9-16.HUANG Tianlun,HUShengchao,LIUXiao,etal.Relative poseand pose pool optimizedcategory-level6Dposeestimation model[J].Automation& Information Engineering,2025,46(6):9-16.
文章编号:1674-2605(2025)06-0002-08开放获取
Relative Pose and Pose Pool Optimized Category-level 6DPoseEstimation Model
HUANG Tianlun1,2 HU Shengchao1,2 LIU Xiaol WANG Weijun1,2 FENG Wei2 (1.Shenzhen Institutes ofAdvanced Technology,ChineseAcademyof Sciences,Shenzhen 518055,China 2.University of Chinese Academy of Sciences,Beijing 101408, Chia)
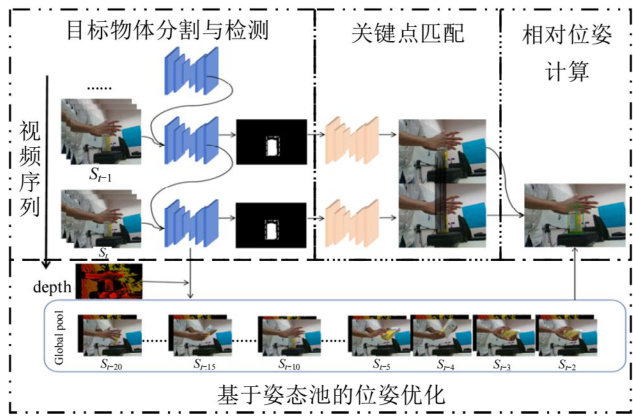
Abstract:Toaddressthe chalenges faced by6Dpose estimation incomplex environments—suchas heavy reliance on highprecision3Dodelsorlage-saletemplatelibaries,severeoclusion,andlightinginterferecetispaperpropossaategor-level 6Dposeestimationmodelbasedonrelativeposeandposepooloptimization.Themodelconstructsaprogressiveestimationframework encompassingettgtadeiottlatieellatiodeolsdio Bycomputing theabsoluteposeofthetargetobjectthroughrelativeposesbetweenadjacentframes,itreducesdependencyonhighprecision3DodelsortmpatelrariesFurthmoreoseoolotiationratgyistroduceditegatigself-ion cross-atentionmechanisms tofusehistoricalframeinformation,therebyenhancingtheaccuracyndobustnessofthecuetpose estimation.Experimentalresults on public datasets NOCS and HO3Ddemonstrate thatthe modelachieves anaverage 5∘5 cm accuracy of 90.35% ,anaverage IoU25of 99.97% ,and an average translation error of 1.72cm on the NOCS dataset,outperforming three comparative models.The average rotation error is 1.90∘ ,which is comparable to the BundleSDF model. On the HO3D dataset, the model achieves an ADD-S of 96.9% and an ADD of 93.4% ,surpassing four comparative models.These results indicate that the model canachieve accurateandstablecategory-level 6Dpose estimatioevenunder weakmodeldependency,providingcrucialsupportfor robotic manipulation in complex environments and practical deployment.
Keywords: 6Dpose estimation;relative pose; pose-pooloptimization; category-levelpose estimation;atention mechanism
0 引言
态估计提供关键支撑。(剩余9497字)
