穴盘苗仿生取喂机械手的设计与试验

打开文本图片集
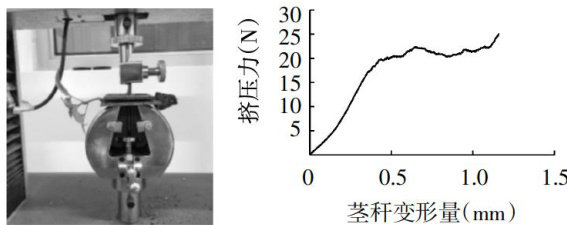
Abstract:Aimingattheproblemsoflowsucsateofseedlingtaking,highrateofseedinginjuryandcomplicatedstructureof transplantingandseedlingtakingorganzations,thispaperdesignedakindfimitationhumanhandheldseedlingayofmanpulator anddescribedthestructureandoperationprincipleofthedevice.Themechanicalcharacteristictestwascaredoutwith6Odayold chilipeppersedingsastheresearchobjecttoobtainthebasicparametersforthedesigoftemanipulatorstructure.Combiedwith the mechanical characteristics ofthe hole plate seedlings andthe requirements ofplanting agronomy,the end parameters L1, (204号 L2,L3, (20 θ and β of the manipulator were determined to be 15mm 65mm 15mm 150∘ and 120∘ ,respectively. The statics analysis of the manipulator showed that the minimum lifting force and the reset spring force were 3.34N and 6.5N respectively,which providesthebasisfrtheselectionoftheresetspringThesoftwaresimulationandfieldexperimentsofthemanipulatorshowedthat the success rate of taking seedlings were 97.6% 96.8% 95.4% and 93.8% ,respectively, when the seedling picking frequency were operated at 4O, 6O, 90 and 120 plants/min. The highest rate of injuring seedlings was 3.1% ,which met the requirements of taking andfeeding seedlings,and verified thecorectnessoftheresearch methodand the feasibilityofthe manipulator.
Key Words: Seedling taking device; Mechanical properties; Manipulator; Experiment
doi:10.13620/j.cnki.issn1007-7782.2025.02.003
中图分类号:S223.9 文献标识码:A
0引言
世界蔬菜产量约六成来自中国,目前我国蔬菜栽种多以人手工从苗盘取苗,通过半自动移栽装备完成膜上栽种,该模式劳动成本投人大。(剩余5659字)
