一种边灯式FOD探测设备伺服控制系统设计

打开文本图片集
DOI:10.19850/j.cnki.2096-4706.2021.08.012
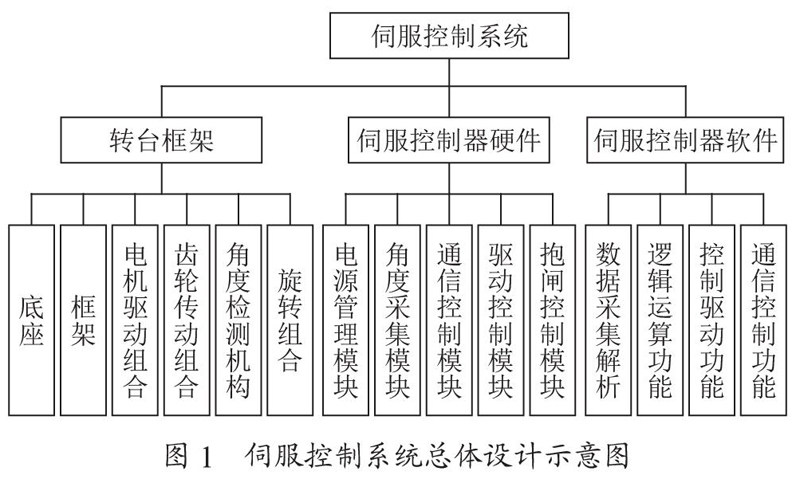
摘 要:文章分析了边灯式FOD探测设备伺服控制系统的特点,从转台框架设计、伺服控制器硬件设计和伺服控制器软件设计三个方面介绍了伺服控制系统的设计与实现。结构上采用步进电机经行星减速机构及齿轮副减速的形式,伺服控制器硬件采用TMS320F28335作为主处理芯片,软件采用模块化方法进行设计和实现。(剩余6052字)
网站仅支持在线阅读(不支持PDF下载),如需保存文章,可以选择【打印】保存。