车载视角下基于视觉信息的前车行为识别

打开文本图片集
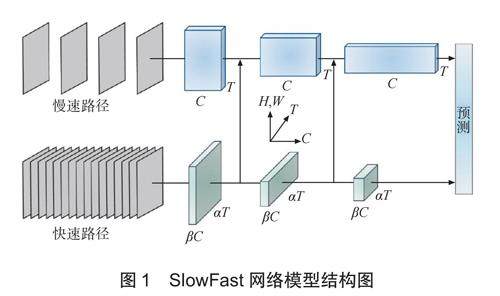
关键词:自动驾驶汽车;车端感知;前车行为识别;SlowFast网络;车载视角
自动驾驶汽车涉及的关键技术包括感知认知、决策规划和控制执行等环节。其中,实现对前方车辆的行为识别是自动驾驶环境感知认知的重要内容,也是自动驾驶决策控制的重要基础。
当前关于车辆行为识别研究的主要路径为:通过感知前方车辆目标的时空位置,将感知数据投影于鸟瞰视角(bird'seyeview,BEV)下,基于大地坐标系下的历史轨迹信息对前车进行行为识别,进而开展自车后续的决策规划控制。(剩余8278字)
