注册帐号丨忘记密码?
1.点击网站首页右上角的“充值”按钮可以为您的帐号充值
2.可选择不同档位的充值金额,充值后按篇按本计费
3.充值成功后即可购买网站上的任意文章或杂志的电子版
4.购买后文章、杂志可在个人中心的订阅/零买找到
5.登陆后可阅读免费专区的精彩内容
打开文本图片集
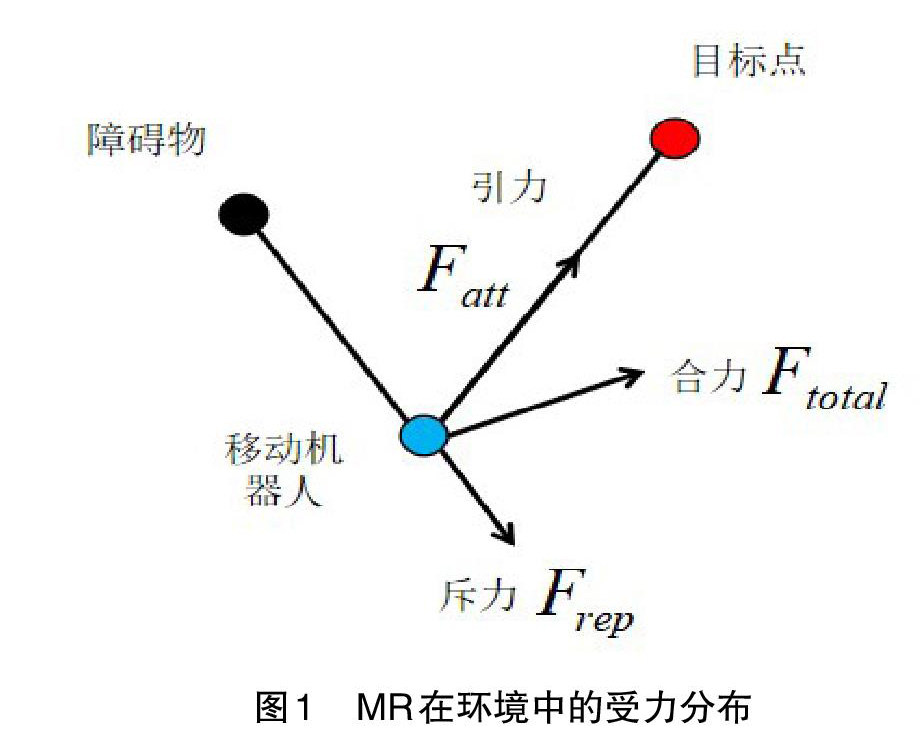
关键词:移动机器人;人工势场法;路径规划;椭圆模型;虚拟目标点
中图分类号:TP242.6 文献标识码:A 文章编号:2095-7394(2022)04-0082-09
作为移动机器人(MR)研究的重要技术之一,路径规划在人工智能的各个方面均有所体现。路径规划是从起始位置到目标位置,寻找一条最合适快捷的路线[1],其常用方法有遗传算法(GA)、快速搜索随机树算法(RRT)、人工势场法(APF)等。(剩余4134字)
登录龙源期刊网
购买文章
基于椭圆模型人工势场法的移动机器人路径规划研究
文章价格:4.00元
当前余额:100.00
阅读
您目前是文章会员,阅读数共:0篇
剩余阅读数:0篇
阅读有效期:0001-1-1 0:00:00