基于五维模型理论的码垛工作站数字孪生系统

打开文本图片集
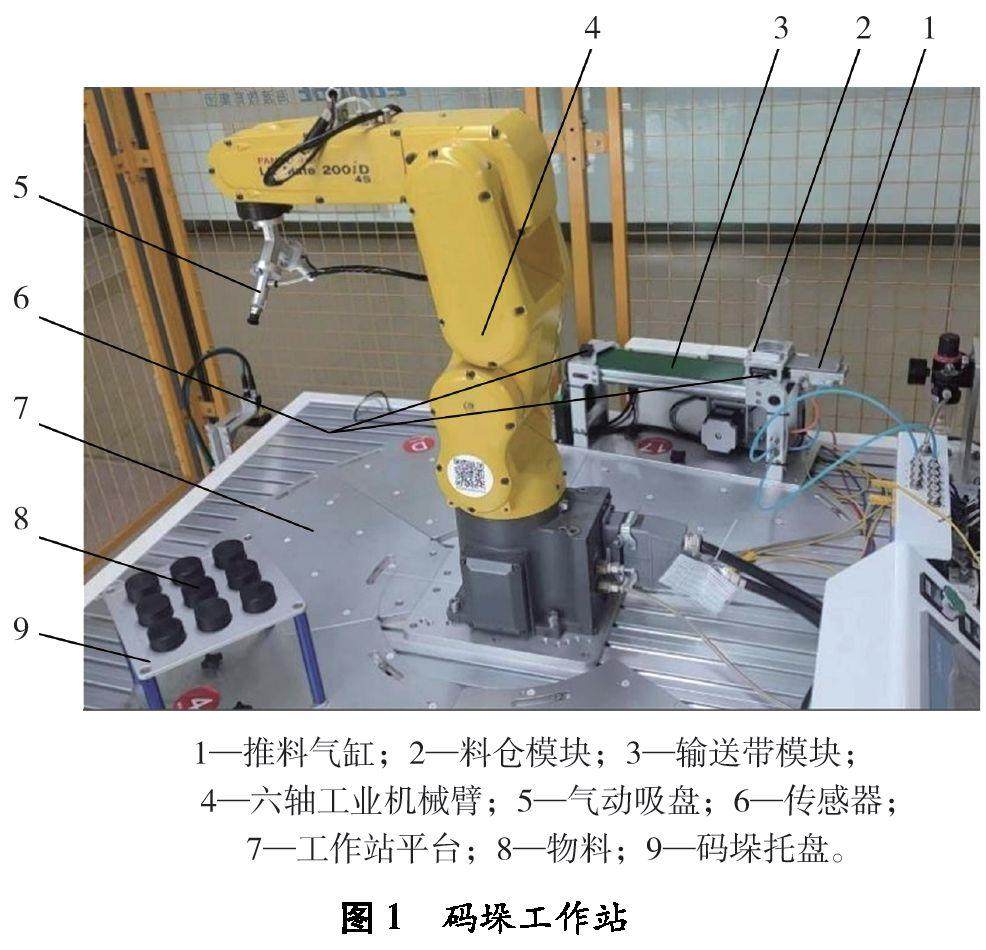
摘要:为提高码垛工作站的智能化水平,以数字孪生五维模型理论为基础,采用三维建模软件SolidWorks对物理码垛工作站进行三维建模,通过仿真软件Simreal将三维模型转化为虚拟码垛工作站,设置虚拟码垛工作站中六轴工业机械臂、气动吸盘、传感器等结构的物理属性和初始参数,采用可编程逻辑控制器设计并实现码垛工作站的工艺流程,通过通信协议Modbus、Siemens S7等实现物理码垛工作站与虚拟码垛工作站间的数据交互和实时通信,构建码垛工作站的数字孪生系统。(剩余9776字)
