电磁悬浮系统的改进线性自抗扰控制方法

打开文本图片集
摘 要:
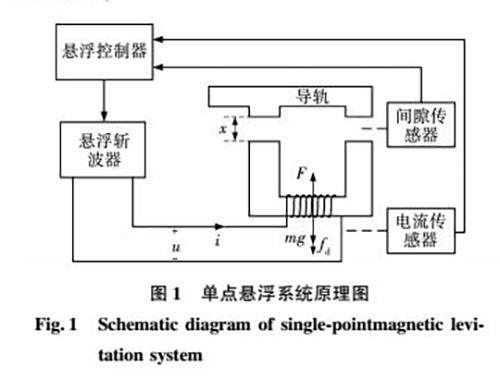
单点电磁悬浮系统是常导电磁磁浮列车悬浮系统的关键控制单元。针对单点电磁悬浮系统因强干扰影响导致控制性能下降的问题,提出了一种改进型线性自抗扰控制(LADRC)方法。首先,基于电磁悬浮结构及原理建立了单点悬浮系统线性化模型,并对系统稳定性进行了分析。其次,基于自抗扰控制方法设计位置外环控制器以及基于PI调节器的电流内环控制器,对线性扩张状态观测器进行改进,设计两级级联的线性扩张状态观测器提高扰动估计精确度及速度,进而提高LADRC中扩张状态观测器对系统扰动的估计能力,并在频域上分析了改进型LADRC扰动估计性能和抑制能力的优越性。(剩余15830字)
