自适应巡航控制系统主动换道功能研究

打开文本图片集
中图分类号:U471.1 文献标志码:A DOI:10.20104/j.cnki.1674-6546.20240321
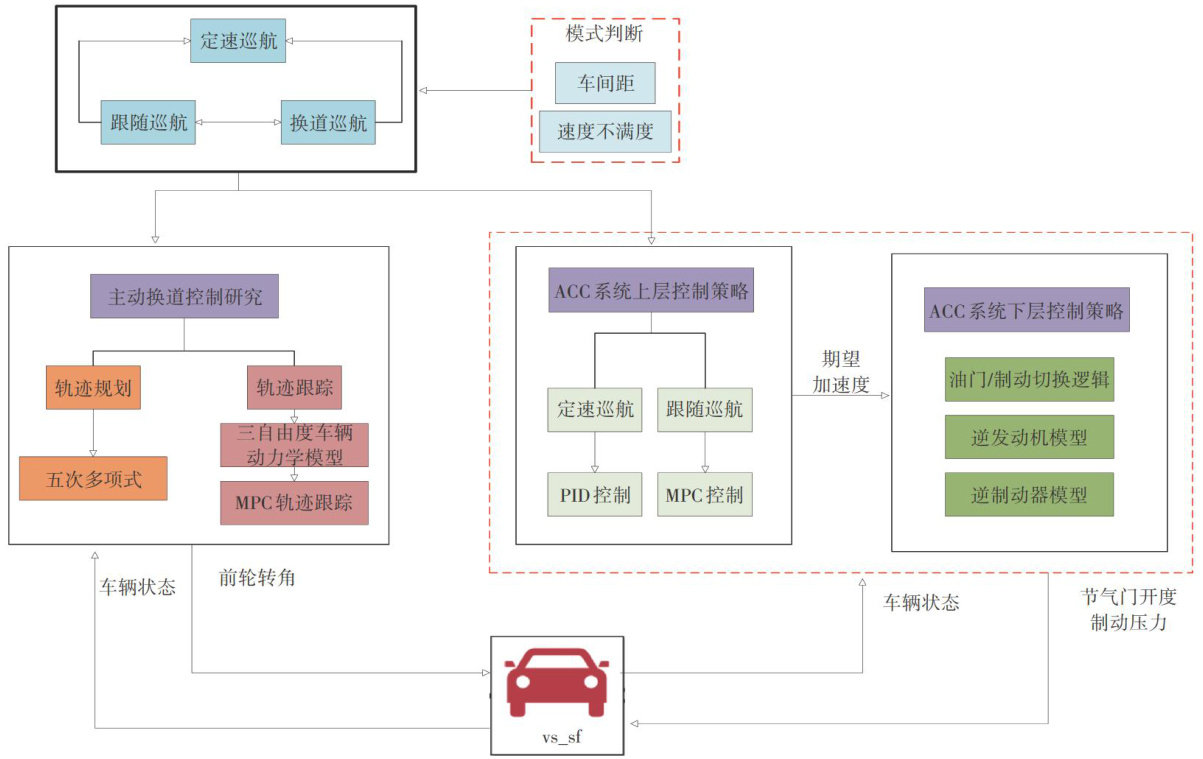
【Abstract】To addressthechallenge where the traditional Adaptive Cruise Control (ACC)are limited to maintain lowspeed following when encountering a low-speed vehiclein front,an ACC control systemwith lanechange functionis developed.Firstlythesystem subdivides thedriving modes into threetypes:cruisecontrol,cruise folowing andlane change cruise,andamulti-modeswitchingstrategybasedospeeddissatisfactionisformulatedtoflexiblyrespondtodiferentdriving scenariosanddriver’sneeds.Onthebasisoftheexistingadaptivecrusesystem,theactivelanechangefunctionisaded,and thequinticpolynomial isusedtoaccuratelyplanthelanechange trajectory,and thenthelanechangecruise trajectorytracking controller isconstructedbasedonthe Model PredictiveControl(MPC)algorithm.Finally,thecontrollerisverifiedbasedon MATLAB/Simulink/CarSim.Thesimulation resultsshow that the proposed strategy mets the requirements of active lane change in line with the driver's intention.
Key words: Adaptive Cruise Control (ACC), Model Predictive Control (MPC), Lane change, Quinticpolynomial
【引用格式】武子为,秦玉英.自适应巡航控制系统主动换道功能研究[J].汽车工程师,2025(8):42-48. WU ZW,QINYY.Research on Active Lane Change Function Based on Adaptive Cruise Control System[J]. Automotive Engineer,2025(8): 42-48.
1前言
在换道工况中,换道行为分为两种:强制换道,即因路面状况限制,驾驶员依道路交通法规指引,被迫改变行驶车道;自由换道,即当前车道前方存在低速行驶的车辆,驾驶员为获得更好的驾驶体验,选择换道以获得更高的车速。(剩余6767字)
