自卸车右转盲区风险目标动态检测算法研究

打开文本图片集
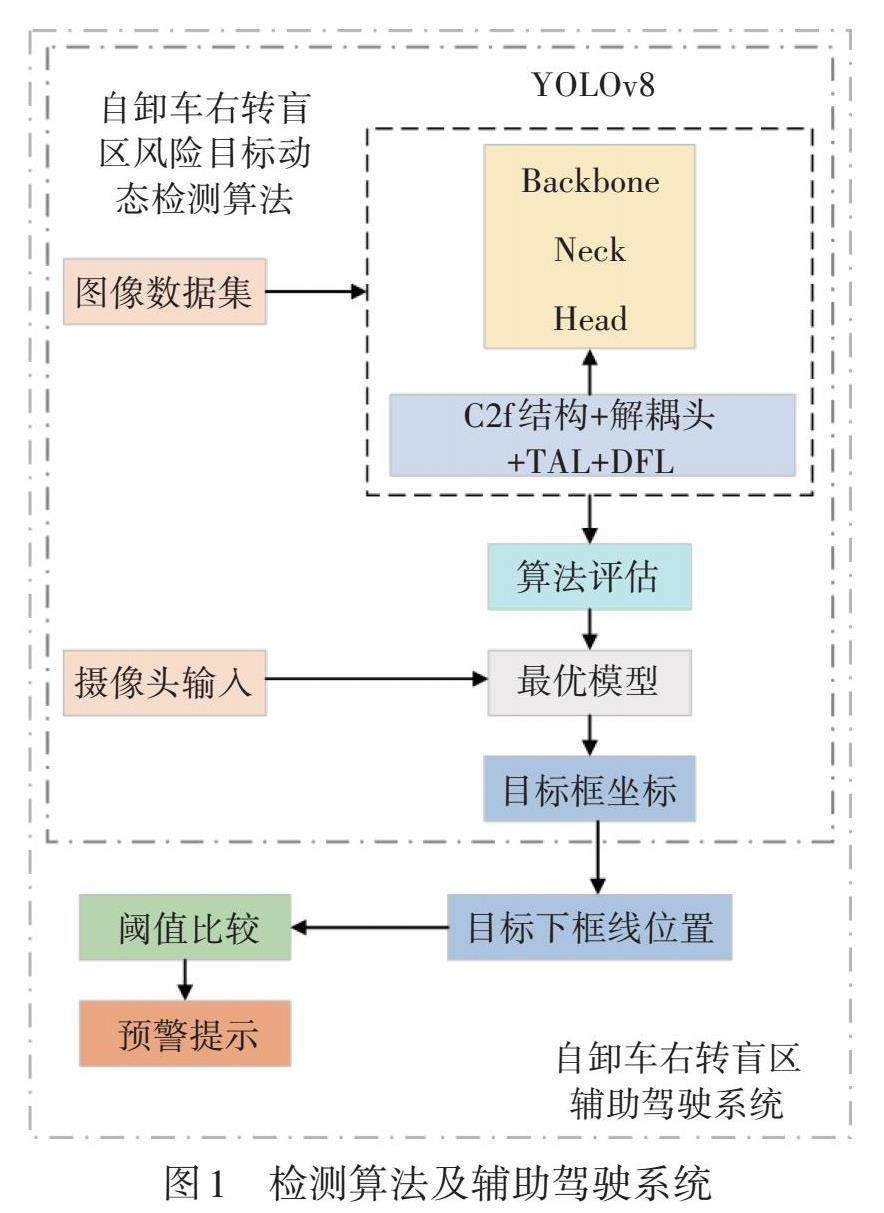
【摘要】针对自卸车外形尺寸大导致车辆右转弯时存在较大视野盲区的问题,提出一种自卸车右转盲区风险目标动态检测算法,该算法利用YOLOv8模型的C2f模块和损失计算模块,提高了模型的检测精确率。同时,在盲区中预设4条位置阈值线,增加盲区风险预警模块,建立了自卸车右转盲区辅助驾驶系统。结果表明:所提出的风险目标动态检测算法能够识别小型乘用车、载货汽车、公交车、行人和电动自行车等多种类型的目标,且所有类别目标的50%交并比阈值下的平均精度均值(mAP50)为0.87;自卸车右转盲区辅助驾驶系统能够根据图像中风险目标框的位置进行不同程度的预警。(剩余9052字)
