多线激光雷达旋转平台外参标定方法研究

打开文本图片集
关键词:多线激光雷达;雷达标定;外参标定;三维重建;点云中图分类号:TN958.98;TP391.4 文献标识码:Adoi:10.37188/OPE.20253316.2543 CSTR:32169.14.OPE.20253316.2543
Research on the external calibration method for multi-beam LiDAR rotating system
WANG Shiqiang1,MENG Zhaozong1,GAO Nan¹, ZHANG Zonghua 1,2 (1. College ofMechanical Engineering,Hebei University of Technology,Tianjin 3Oo4O1,China; 2. Innovation and Research Institute ofHebei University of Technology in Shijiazhuang, Shijiazhuang 050299,China) * Corresponding author, E -mail:zhzhang@hebut. edu. cn
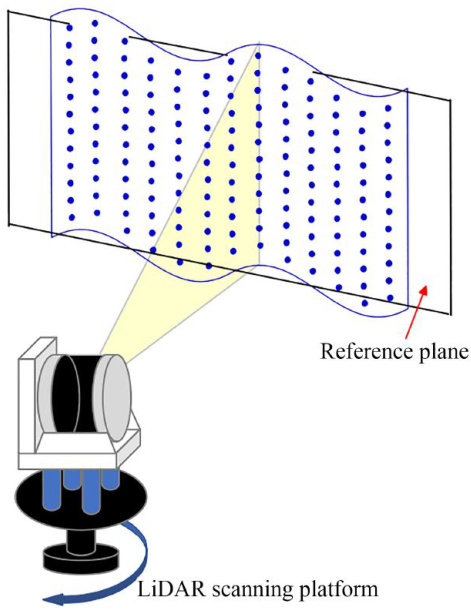
Abstract:Toachieve ful-view point cloud dataacquisition of three-dimensional (3D)scenes,this paper proposed a multi-beam LiDAR rotational scanning system. The quality of the 3D point cloud reconstructed by this system was highly dependent on the pose transformation relationship between the LiDAR and the rotating platform.However,existing calibration methods were mainly designed for single-line LiDAR applications and faced issues such as overly simplistic calibration models and severe parameter coupling. Therefore,this paper presented an extermal parameter calibration method for multi-beam LiDAR rotating platforms based on planar features. First, a mathematical model for calibrating the target parameters was constructed based on plane features by integrating the RAndom SAmple Consensus (RANSAC) algorithm.Then,an improved Particle Swarm Optimization(PSO)algorithm,which introduced a linearly decreasing inertia weight coeficient to replace the fixed inertia weight,was employed to optimize the constructed mathematical model. Finally,the accuracy and effectiveness of the proposed calibration strategy were validated through point cloud thickness analysis and 3D scene reconstruction evaluation in both simulation and real-world scenarios.Experimental results show that the point cloud thickness is reduced from 7.6681cm before calibration to 4.0390cm aftercalibration,indicating that the point cloud distribution reconstructed using the proposed calibration method is more uniform. The comparison of point cloud distribution in reconstructed scenes before and after calibration further verifies the effectivenessand reliability of the proposed method.
Key words : multi-beam LiDAR; LiDAR calibration;external calibration;3D reconstruction; point cloud
1引言
多线激光雷达通过时间飞行法获取距离信息,并结合方位角和仰角计算三维点云数据[1]。(剩余10505字)
