点云法向量与曲率关键特征配准

打开文本图片集
Key feature registration of point cloud normal vector and curvature
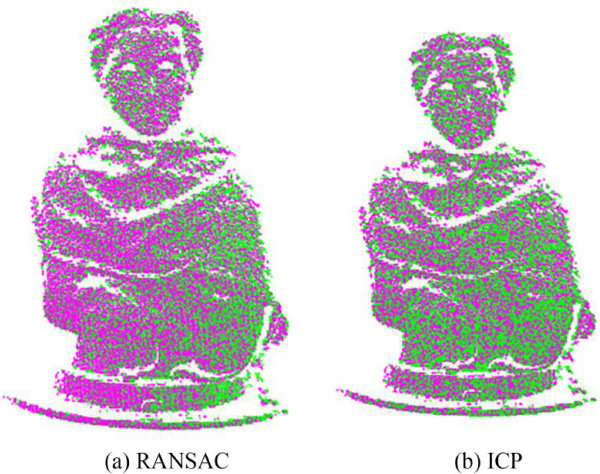
Abstract: To address the challenge of point cloud registration for complex feature targets,a method lever aging point cloud normal vectors and curvature key features is proposed. Principal component analysis is utilized to compute curvature across varying neighborhood radii,facilitating effective key point selection and initial point cloud downsampling. For each key point,a seven-dimensional feature descriptor is constructed,comprising four normal vectors and three curvature values,thereby encapsulating both angular relationships among normal vectors and curvature characteristics.Similarity between key point descriptors of source and target point clouds is assessed,and correspondences are initially established based on the ratio of the Euclidean minimum distance to the sub-minimum distance.The Random Sample Consensus (RANSAC) algorithm is subsequently employed to eliminate incorrect correspondences and reduce mismatches.High-precision registration is achieved via the Iterative Closest Point (ICP) algorithm,enabling computation of the transformation matrix and quantitative evaluation of registration eror. Experimental results demonstrate a root mean square error(RMSE) of 3.32mm in feature extraction and registration for complex targets,with an average error increment of 0.33mm/(∘) within a 0-50∘ registration range. Comparative experiments confirm the superior robustness of the proposed method in large-angle registration of complex targets. Specifically,for space satelite targets,the RMSE of feature extraction and registration is (204号 2.71mm ,accompanied by a Y -direction attitude angle error of 0O. 427∘ . The proposed method effectively sup ports pose estimation and registration of space targets,indicating broad potentialfor practicalapplications.
Key Words: point cloud registration; complex target; normal vector; curvature; error analysis
1引言
点云作为典型的三维模型,其优势在于能从多个视角捕捉到完整形状的目标,但受限于测量方法和硬件性能,直接采集的点云存在噪声信号大、数据精度低和采集时间长的问题。(剩余21173字)
