融合语义与三维信息的路面图像逆透视变换

打开文本图片集
Inverse perspective mapping pavement image combining semantic and3D information
XIA Xiaohua*,GAOXiaei,DUAN Zhiwei,FENGXinmiao ( , , ,) * Corresponding author, E -mail:xhxia@chd.edu.cn
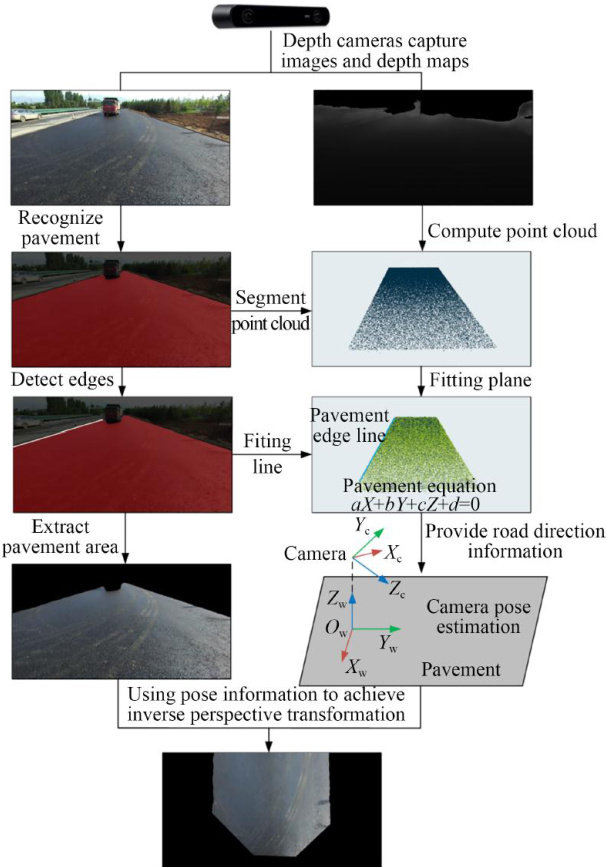
Abstract: Inverse perspective mapping (IPM) pavement images is a prerequisite for image-based vehicle distance perception and pavement damage measurement. The traditional static IPM methods have the problem that the transformation parameters cannot be dynamically adjusted,and the existing dynamic IMP methods are highly dependent on the information such as road lane lines and textures,which ten lead to suboptimal correction perspective distortion. To solve these problems,this study proposed a dynamic IPM method for pavement images based on depth-camera semantic segmentation and 3D plane fiting. First,a semantic-segmentation model was used to extract pavement regions from RGB images,and 3D plane fiting was performed on the corresponding point-cloud data within the pavement regions, eliminating theinterference non-pavement point clouds on pavement fiting. On this basis,using pavement information and the spatial positional relationship between the camera and the pavement,the relative pose the camera with respect to the pavement was calculated through a camera-pose-estimation method.Finally,based on the imaging relationship the pavement under diferent camera poses,a constructed pavement-image IPM model was used to correct perspective distortion from the original image to any reference point. Simulation experiments show that the perspective distortion correction error the proposed method is stable at 10-2 mm when the camera pose has common variations,which is better than the current advanced IPM methods,demonstrating that the proposed method efectively improves the quality pavement image IPM. Real-world experiments further validate the effectiveness the proposed method.
words: machine vision; pavement image;dynamic inverse perspective mapping; semantic segmenta-tion;pose estimation
1引言
随着机器视觉技术的发展以及应用需求的增加,相机常装备于道路场景下的车辆和机器人上以执行路面环境感知任务,但相机拍摄路面时光轴与路面一般呈现非垂直状态,会产生近大远小的透视投影图像失真以及倾斜投影图像失真[1]。(剩余12703字)
